En este artículo se va a mostrar cómo iniciar el montaje de elementos para robótica con la conexión de la alimentación eléctrica a la placa Arduino a partir de un par de baterías recargables 18650 de 3,7 voltios. Este esquema nos servirá para dejar preparadas las conexiones necesarias para alimentar motores y sensores de los robots que posteriormente se puedan montar.
Observarás que se está utilizando una placa con pines soldados que se ha creado expresamente para facilitar las conexiones de alimentación y control de motores, de manera que queden integradas en menor tamaño posible. Ten en cuenta que estas conexiones están pensadas para ser utilizadas en robots, por lo que siempre habrá que tener en cuenta tamaños y pesos de los elementos. En el artículo Cómo construir una placa de conexiones para robótica puedes ver cómo se construye esta placa y cómo están interconectados los pines.
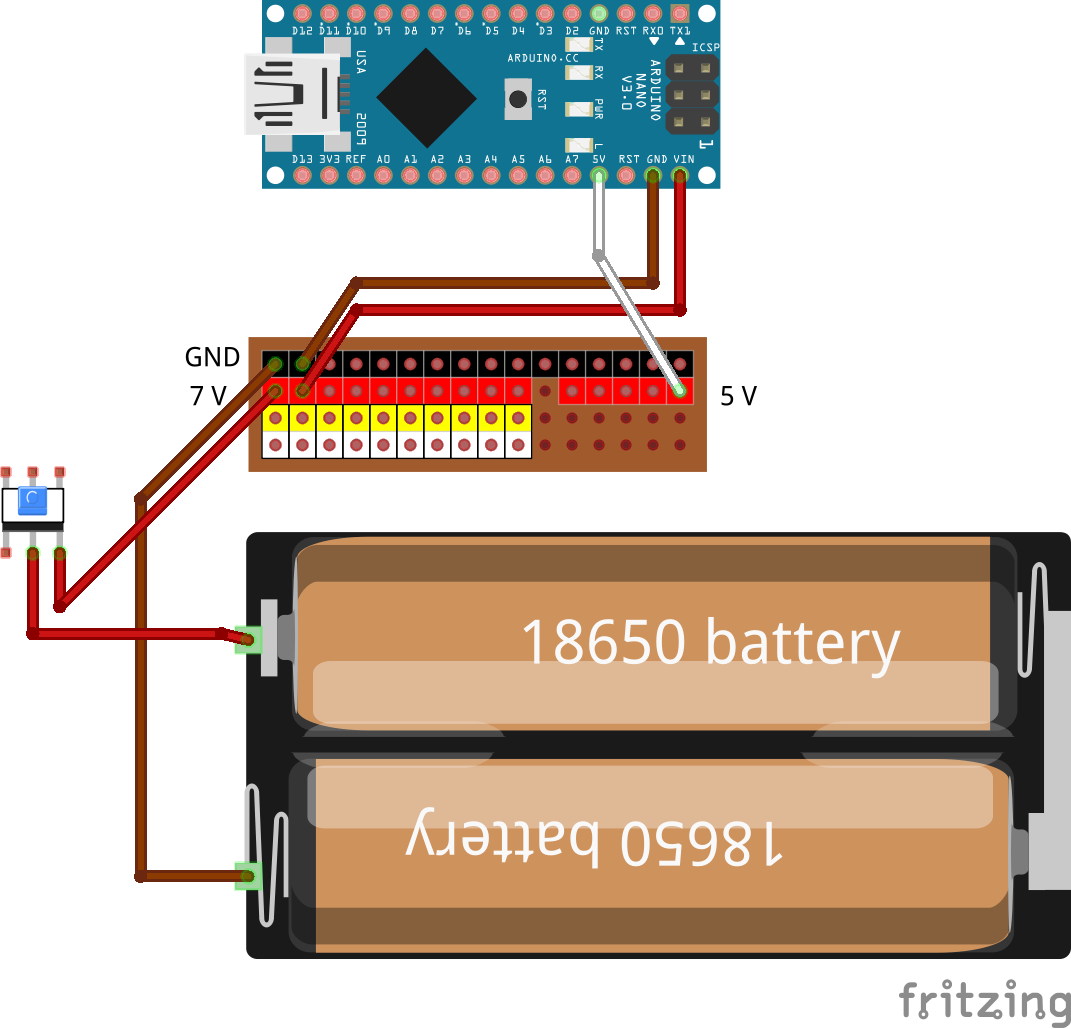
El objetivo será alimentar la placa Arduino con un voltaje superior a 5 voltios (7 voltios con 2 baterías 18650), por lo que se hará la conexión obtenida desde la batería a los pines VIN y GND de la placa Arduino, y se aprovechará ese mismo voltaje para conectar en otro momento la alimentación de motores. Además se usará la salida de 5 voltios de la placa Arduino para obtener ese voltaje en otros pines de la placa de conexiones, donde se conectará la alimentación de sensores del robot que usen ese voltaje.
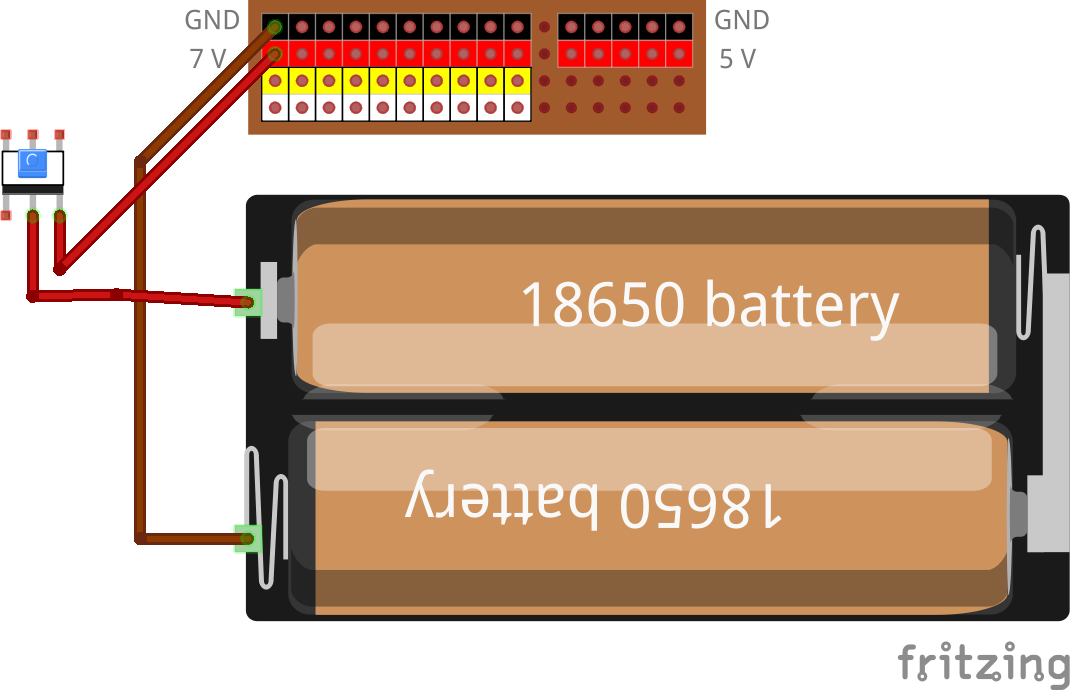
Esquema de conexiones
Elementos necesarios
Materiales:
- 1 x Arduino Nano. Se puede utilizar otro tipo de placa Arduino como la Uno, pero el modelo Nano es más recomendable para el tipo de robots que se quieren construir por su reducido tamaño.
- 1 x Placa de conexiones (Puedes ver cómo construirla en: Cómo construir una placa de conexiones para robótica). Se podría usar alternativamente un Shield Arduino Nano Multipropósito pero se incrementaría el tamaño final, y se desea obtener el mínimo tamaño posible para que el robot final sea lo más ligero y pequeño posible. Otra alternativa más es realizar las conexiones uniendo los cables directamente, pero van a quedar más desordenadas las conexiones y con más riesgo de problemas de conexión.
- 2 x baterías recargables 18650 de 3,7 voltios cada una, preferiblemente con protección PCB. Puedes ver más información sobre este tipo de baterías y otras opciones en el artículo Baterías para robots Squitty.
- 1 x portapilas para 2 baterías 18650 en serie. Entre los módulos de impresión 3D para construir los robots de la serie Squitty puedes encontrar un soporte para este tipo de baterías, aunque para construirlo necesitarás los contactos para las baterías.
- 1 x interruptor 7 x 7 mm con bloqueo (que quede fijo en la posición encendido o apagado). Es opcional usar el interruptor, aunque recomendable, ya que con él no hay que estar tocando los cables para encender o apagar el circuito.
- 7 cables dupont hembra-hembra de 20 cm. Es recomendable que sigas los mismas colores que se utilizan en esta guía para que puedas seguir los pasos con más facilidad.
- 2 fundas termoretractiles o cinta aislante para proteger las conexiones.
Herramientas:
Será conveniente disponer de las siguientes herramientas para unir los dos cables dupont a las conexiones del soporte de las baterías y al interruptor. Si no las tuvieras, podrías hacer un apaño sin usar el interruptor y con un poco de cinta aislante y unas tijeras unir los cables, pero conviene dejar las conexiones bien unidas con soldaduras.
- Soldador
- Estaño
- Pelacables
Instrucciones paso a paso
Preparar las conexiones del soporte de baterías
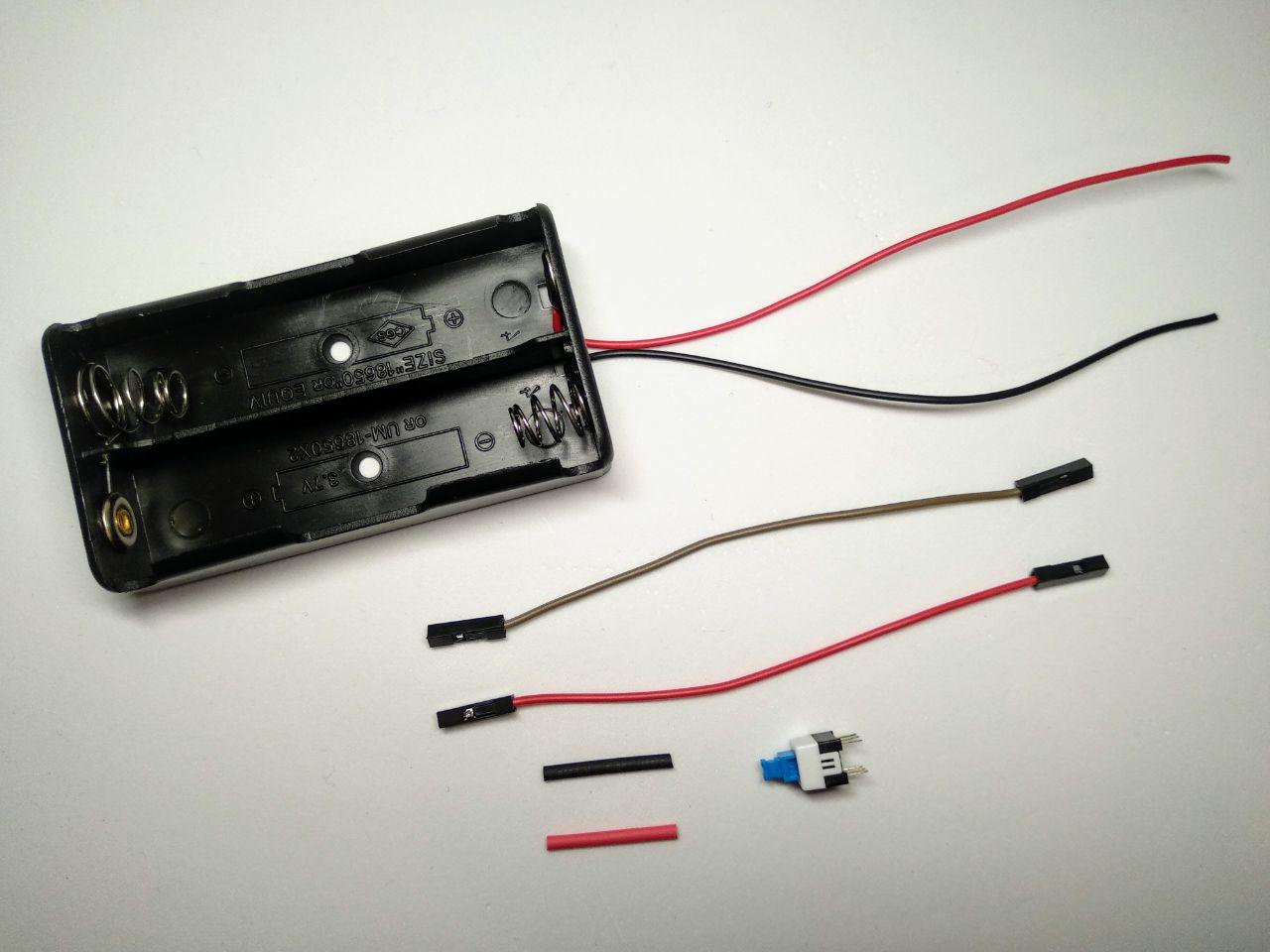
Los soportes de las baterías 18650 suelen venir sin conectores o con conectores diferentes a los de tipo dupont, por lo que necesitamos unir dos trozos de cables con conectores dupont hembra a los extremos de los cables. Además vamos a colocar un interruptor (opcional) en uno de los cables para poder encender o apagar el circuito cómodamente. En este tutorial se van a utilizar cables rojo y marrón para identificar la alimentación eléctrica desde las baterías.
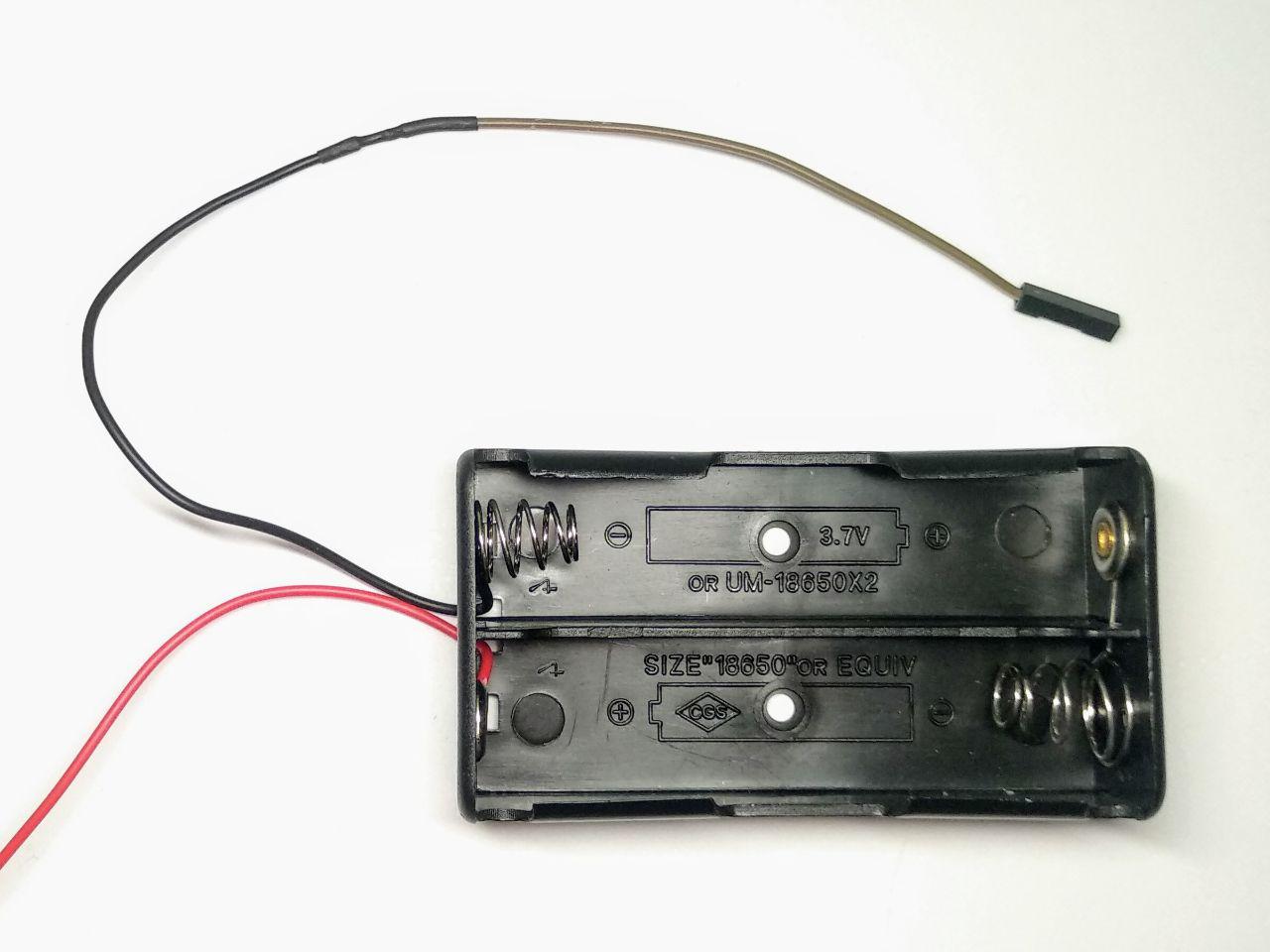
Corta el conector de uno de los extremos de un cable dupont (marrón) y pela una pequeña parte para soldarla con el cable negro del portapilas. Recuerda introducir en uno de los cables el trozo de termoretráctil si lo vas a utilizar en vez de cinta aislante para proteger la conexión.

Suelda los dos cables aplicando estaño a cada cable por separado y luego únelos con el soldador evitando que queden salientes. Desplaza el trozo de termoretráctil y aplícale calor con el soldador para que deje fija la unión.
Con el cable rojo se debe hacer algo similar, pero vamos a colocar el interruptor entre el cable rojo del portapilas y el cable dupont rojo al que le debes cortar uno de los conectores y pelar ese extremo. En caso de que no desees utilizar un interruptor, une el cable rojo del portapilas al cable dupont rojo de manera similar a la que se ha hecho anteriormente.
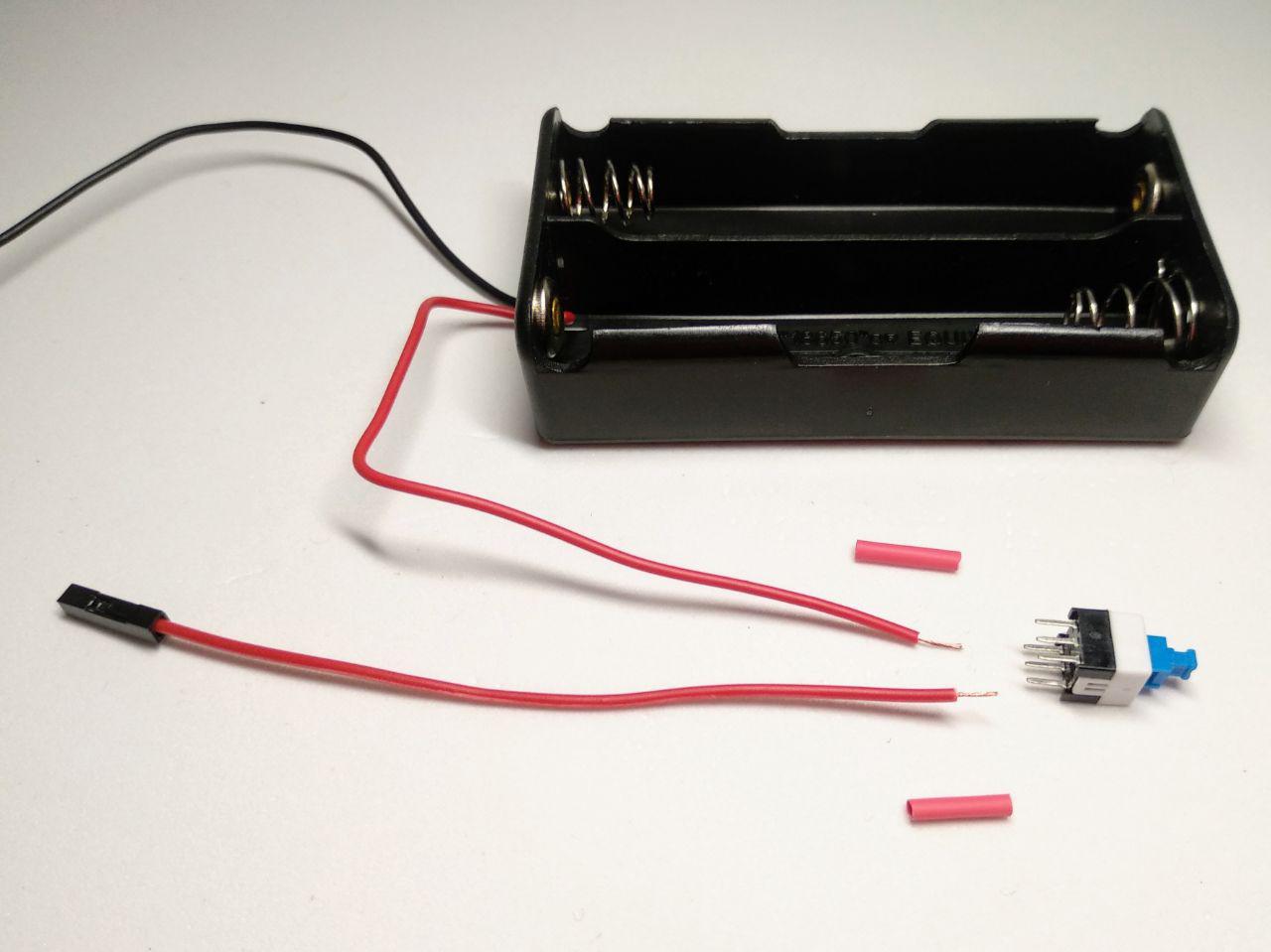
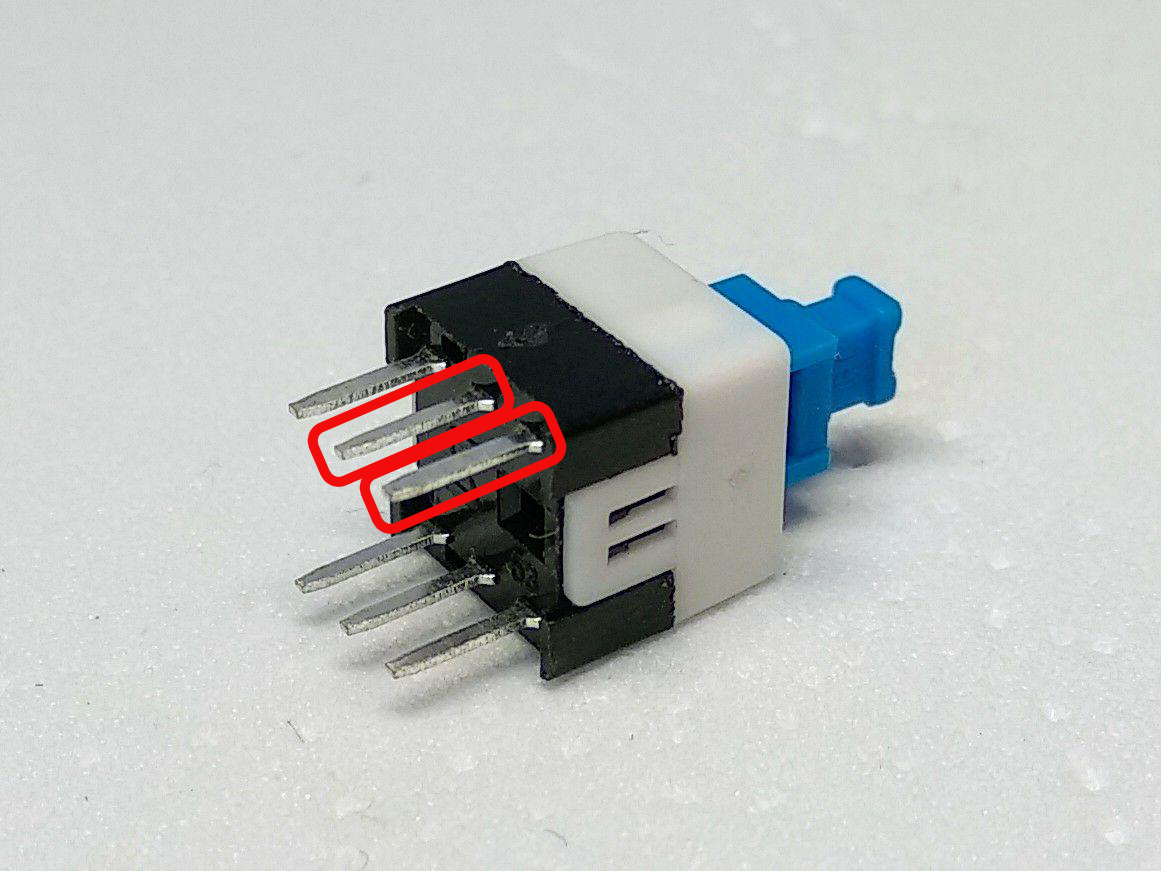
Aplica estaño en los extremos de los cables, así como en las patillas que vayas a utilizar del interruptor. Te recomiendo utilizar las patillas del interruptor que se muestran en la imagen. De esa manera, el circuito se cerrará y recibirá alimentación cuando el interruptor se quede pulsado hacia dentro.
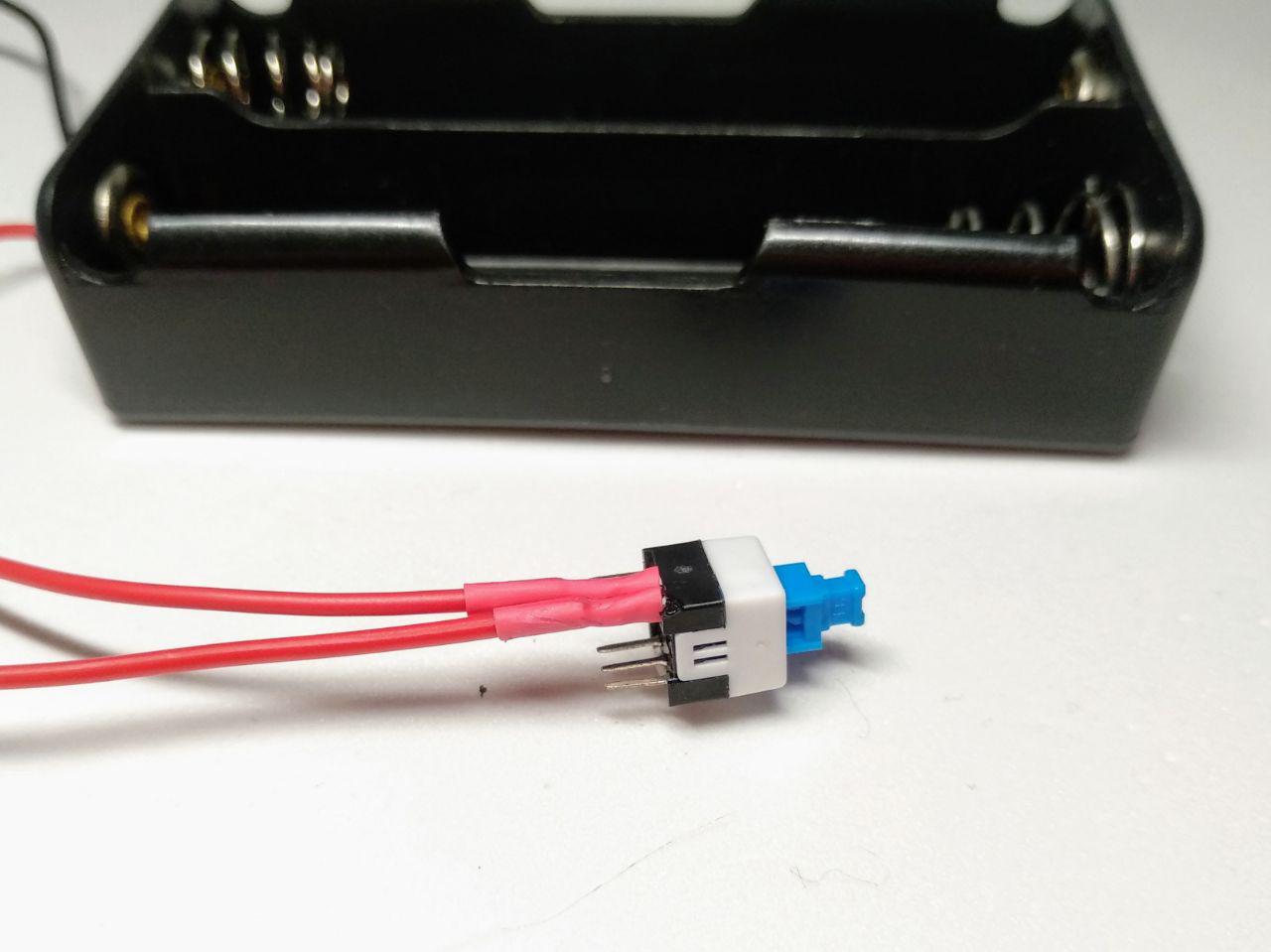
Suelda los extremos del cable rojo al interruptor y asegúralo con dos trozos de funda termoretráctil.
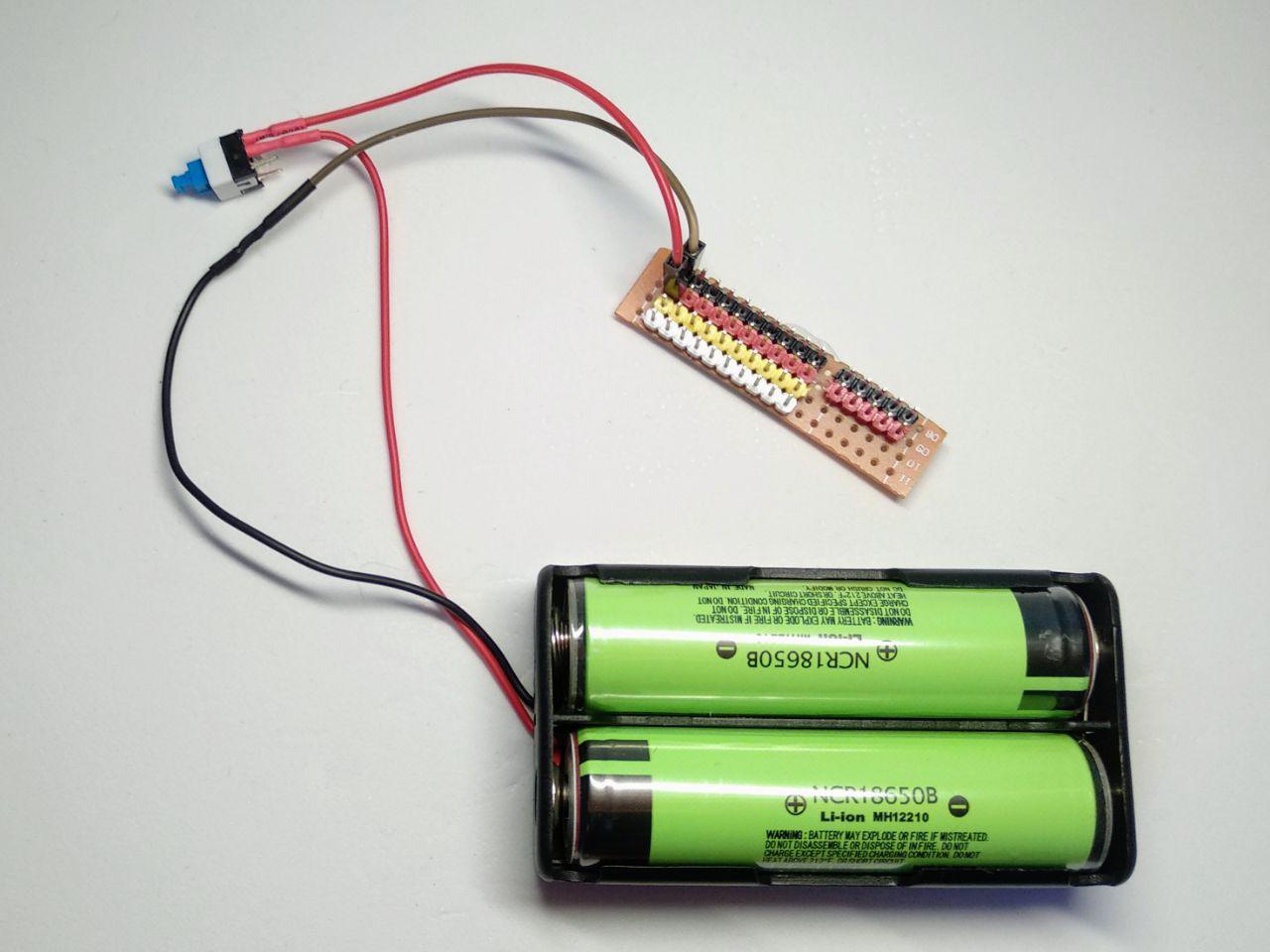
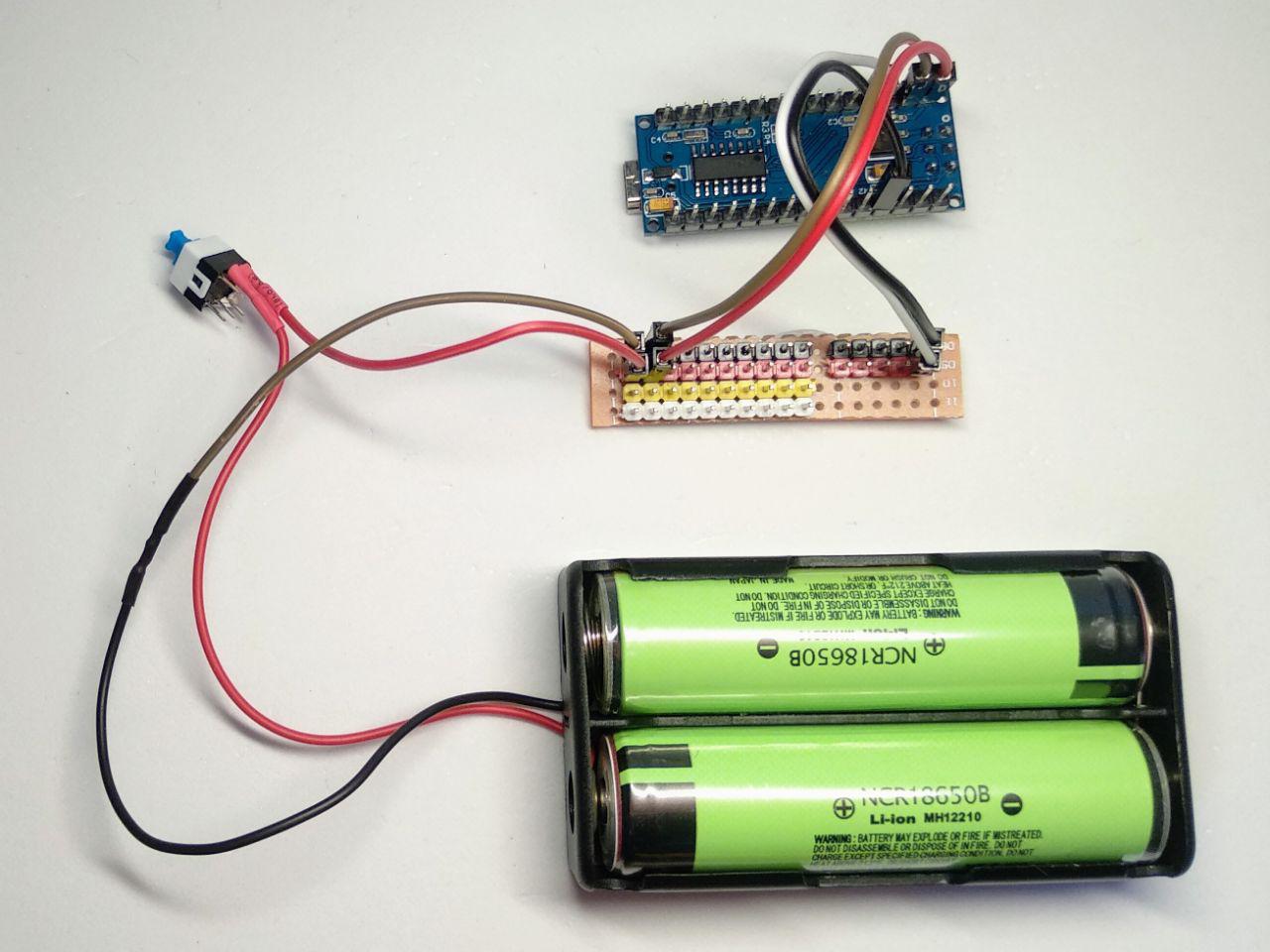
Conecta los cables que has preparado a la placa de conexiones siguiendo el esquema mostrado al inicio del artículo. De esta manera se está proporcionando un voltaje en torno a 7 voltios a todos los pines rojos de la parte izquierda de la placa de conexiones y el polo negativo o GND a los pines negros. En esa parte izquierda de la placa de conexiones se podrán conectar posteriormente elementos como motores que puedan alimentarse con ese voltaje superior a los 5 voltios habituales.
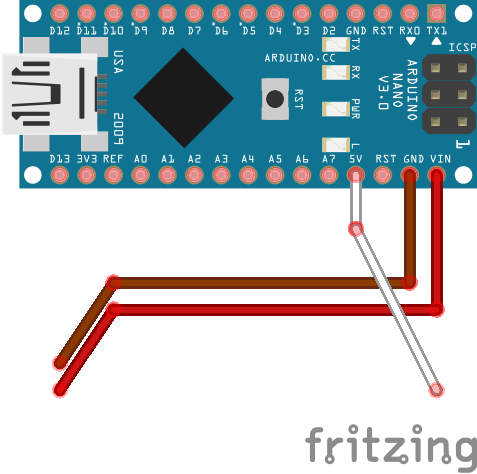
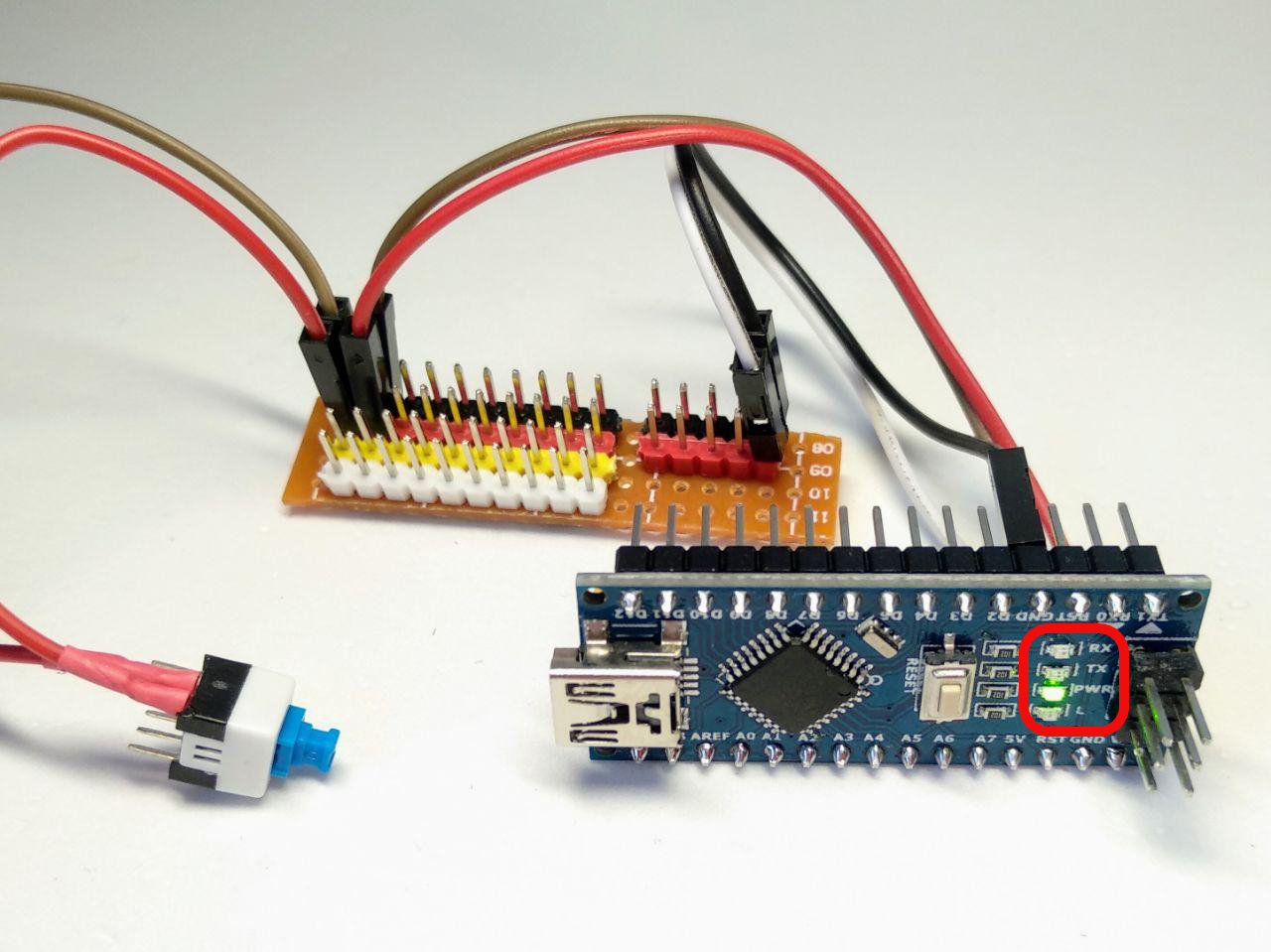
Prepara las conexiones de la placa Arduino con la ayuda de la imagen y del esquema que se muestra a continuación. Ten en cuenta que, en los esquemas, las conexiones se muestran viendo la parte inferior de la placa Arduino, por lo que puede parecer que las conexiones están al revés, así que observa bien la etiqueta que tiene cada pin de la placa Arduino al conectar cada cable.
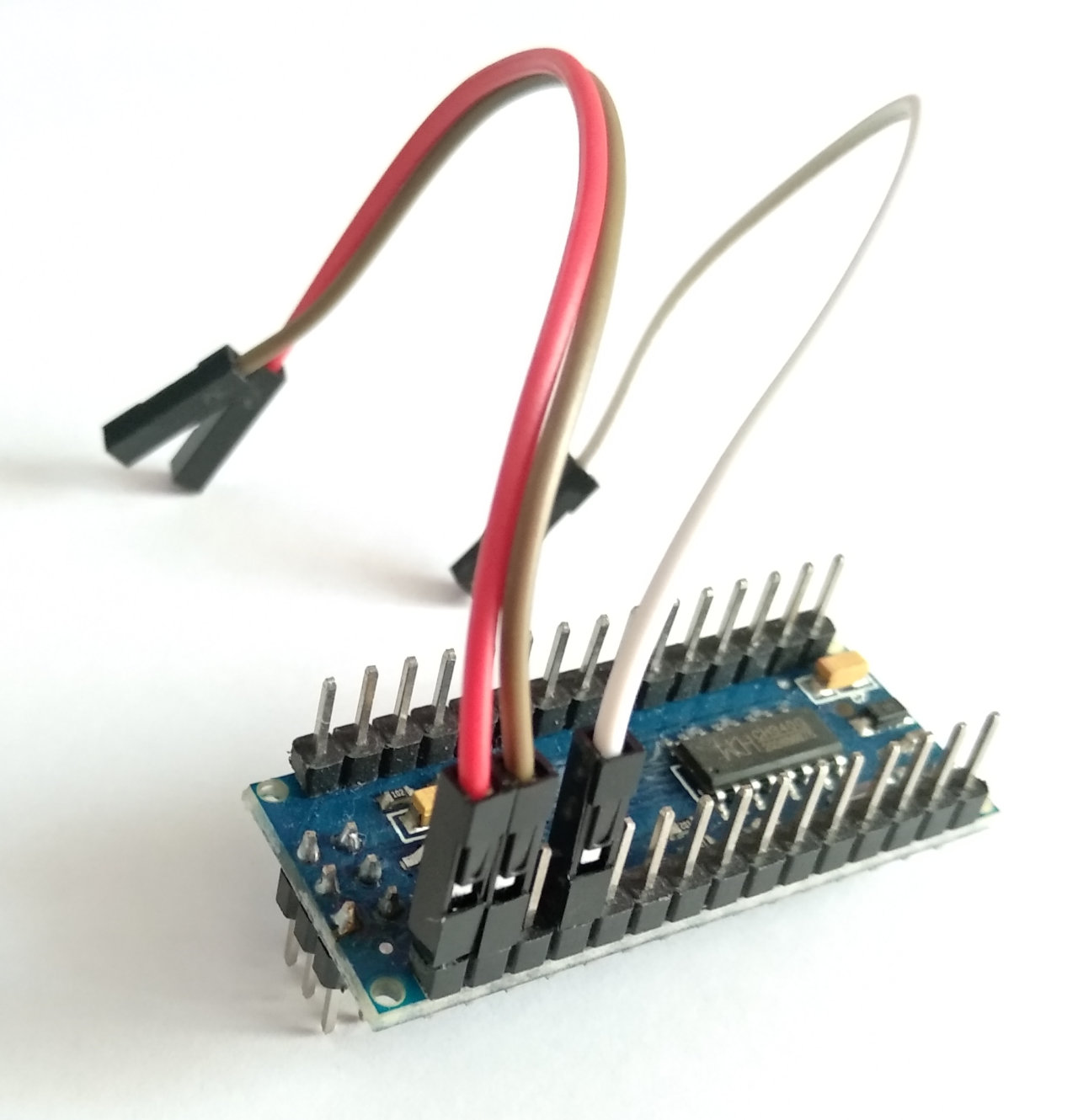
Conecta esos cables a la placa de conexiones para terminar el montaje de esta parte. Los cables conectados en la placa Arduino a GND (marrón) y a VIN (rojo) se conectan a los pines negros y rojo de la izquierda de la placa de conexiones para que la placa Arduino reciba por ahí la alimentación (en este caso 7 voltios). Por otro lado, el cable conectado a 5V se conectan a la parte derecha de la placa de conexiones para conseguir ese voltaje en los pines de la derecha donde se conectarán sensores que necesiten una alimentación de 5 voltios.
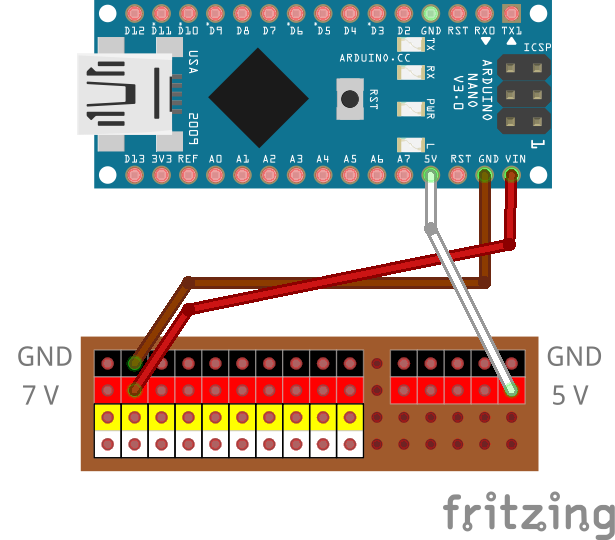
Para comprobar que todo va bien, activa el interruptor y comprueba que en la placa Arduino se enciende el led PWR.
También es conveniente comprobar con un multímetro que los voltajes en la placa de conexiones sean correctas. Sitúa el multímetro en la posición de medición de voltaje que sea capaz de medir entre 5 y 7 voltios. En mi caso lo he situado en la posición 20V y al unir los polos del multímetro a los pines negro y rojo de la parte izquierda debe obtenerse un valor en torno a 7 V, ya que estamos cogiendo el voltaje generado por las baterías.
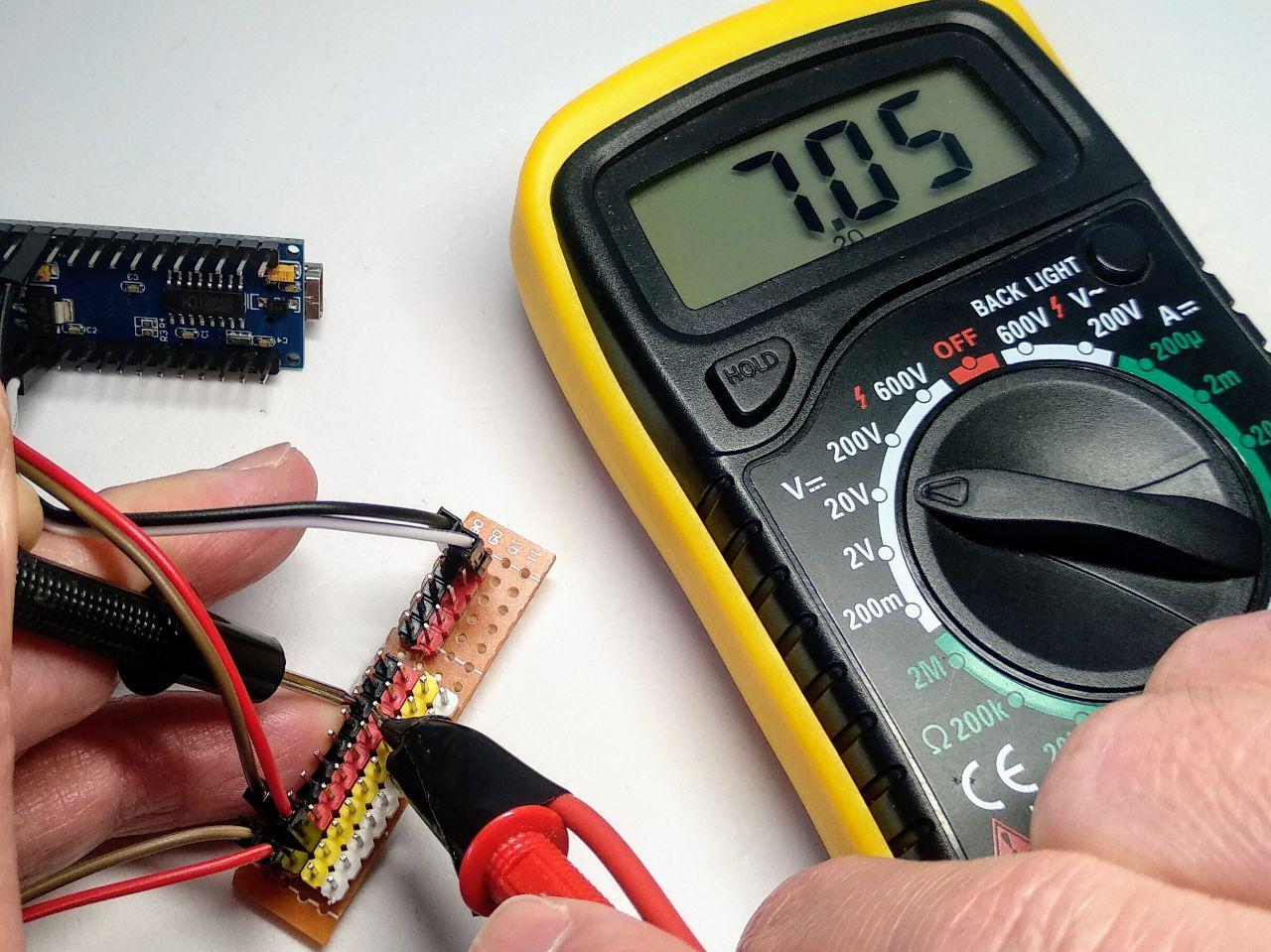
En la parte derecha se debe obtener un valor cercano a los 5 V, ya que estamos cogiendo ese voltaje de salida desde la placa Arduino.
