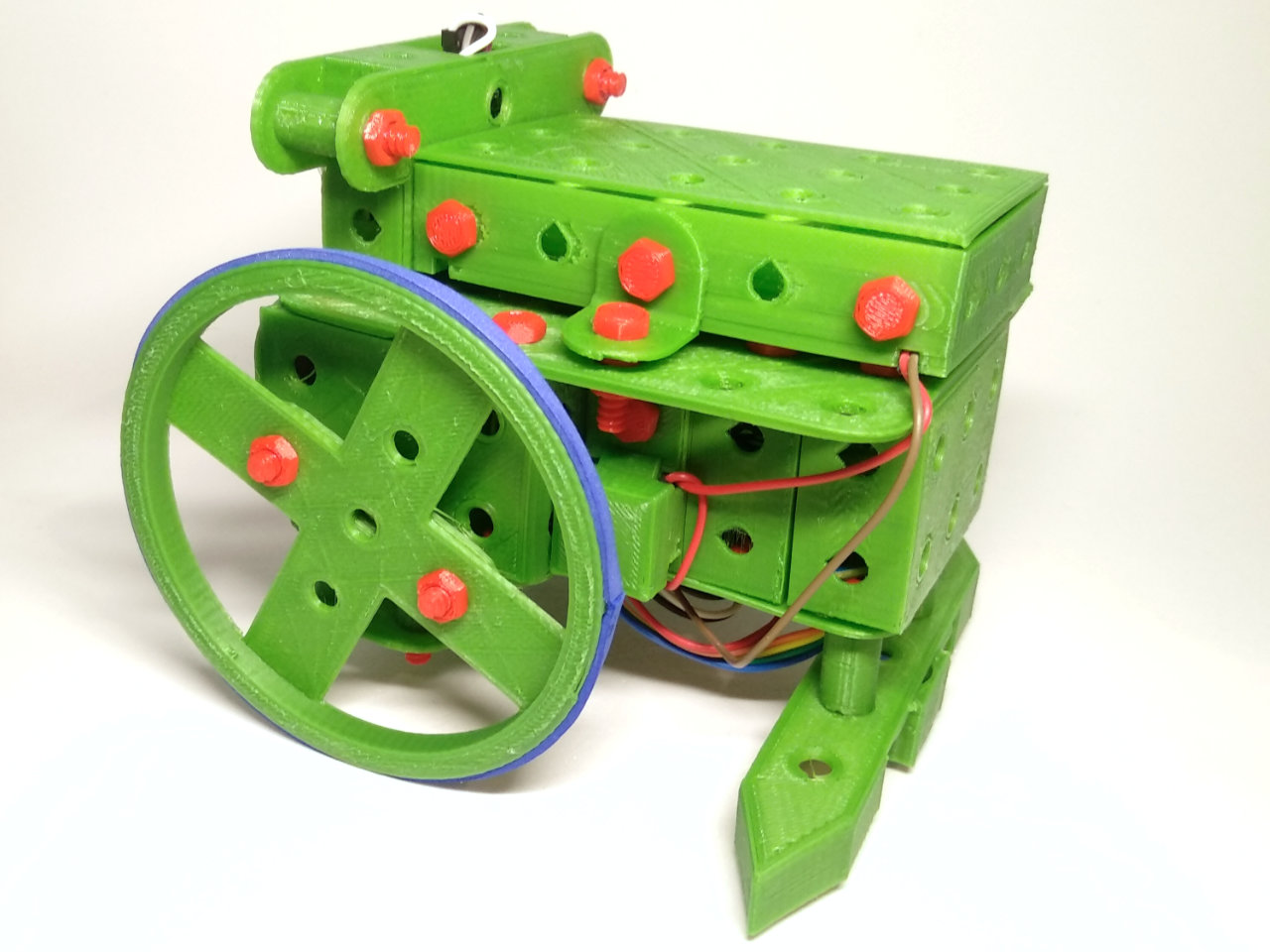
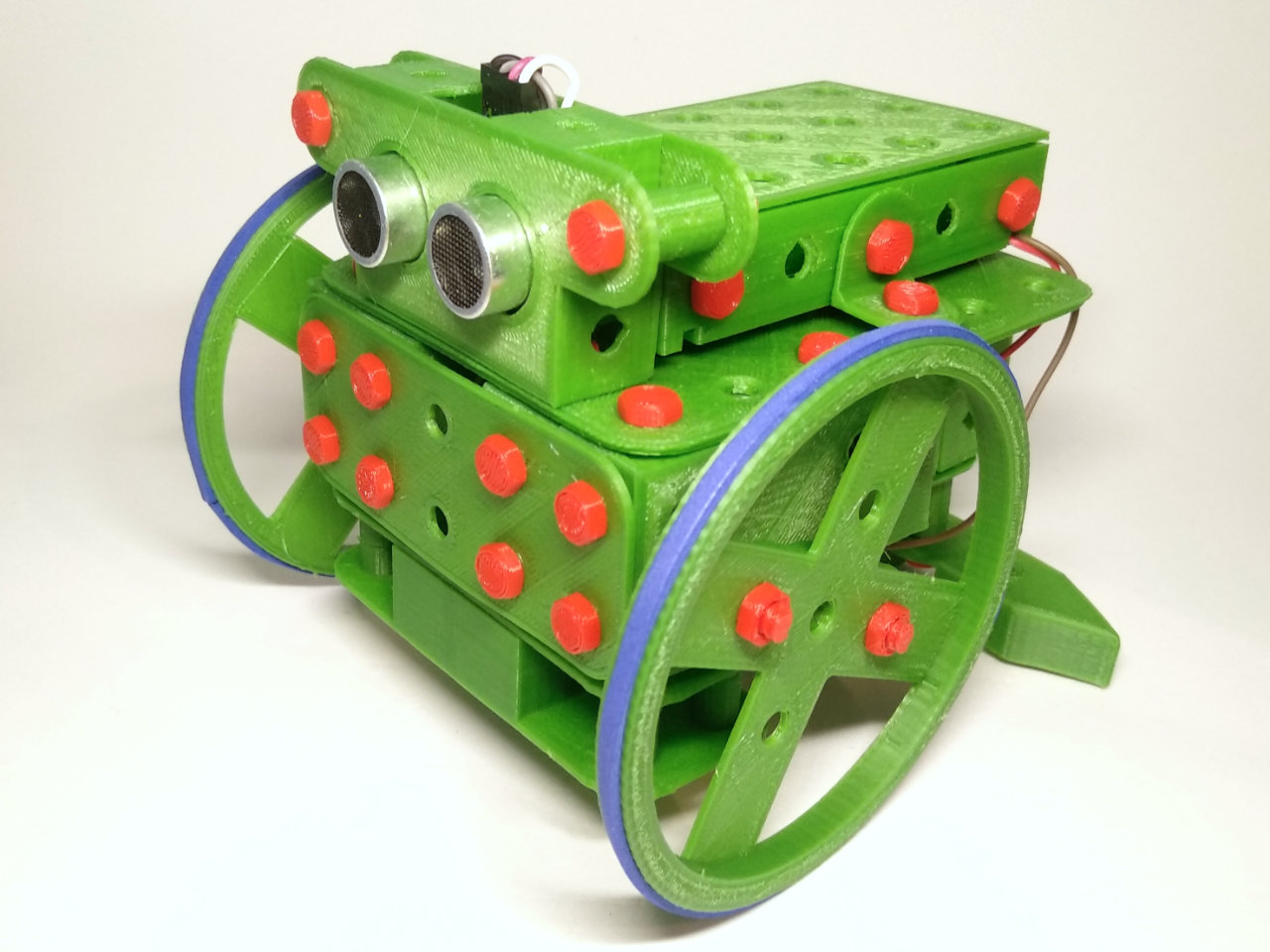
Esta es la guía de montaje del robot Squitty Turtle, el cual permite realizar movimientos de gran precisión, aunque de baja velocidad, por los motores paso a paso que incorpora, al que se le puedan dar órdenes a través de una conexión Bluetooth, permite la detección de obstáculos y el seguimiento de líneas.
El robot lo puedes personalizar a tu gusto, ya que, por ejemplo, se podría montar el robot sin la detección de obstáculos ni el seguimiento de líneas si no lo vas a necesitar. O podrías añadirle otros componentes diferentes usando otras piezas impresas en 3D para este tipo de robots.
Está controlado por una placa Arduino Nano, por lo que su programación se realiza con código abierto, pudiendo encontrar gran cantidad de información en Internet.
Su alimentación eléctrica con baterías recargables permite un ahorro económico y medioambiental mayor que otras opciones que utilizan pilas estándar, y con una duración bastante larga.
Su aplicación es básicamente educativa, permitiendo adaptarse a diferentes niveles educativos y materias, cubriendo desde la programación más avanzada con Arduino hasta su uso más simple con un dispositivo móvil (como cualquier teléfono o tablet) para darle las órdenes que deba llevar a cabo el robot. Esas indicaciones pueden relacionarse con diversas materias educativas, con el fin de que el robot localice diversos objetos situados en un tablero y otras acciones similares.
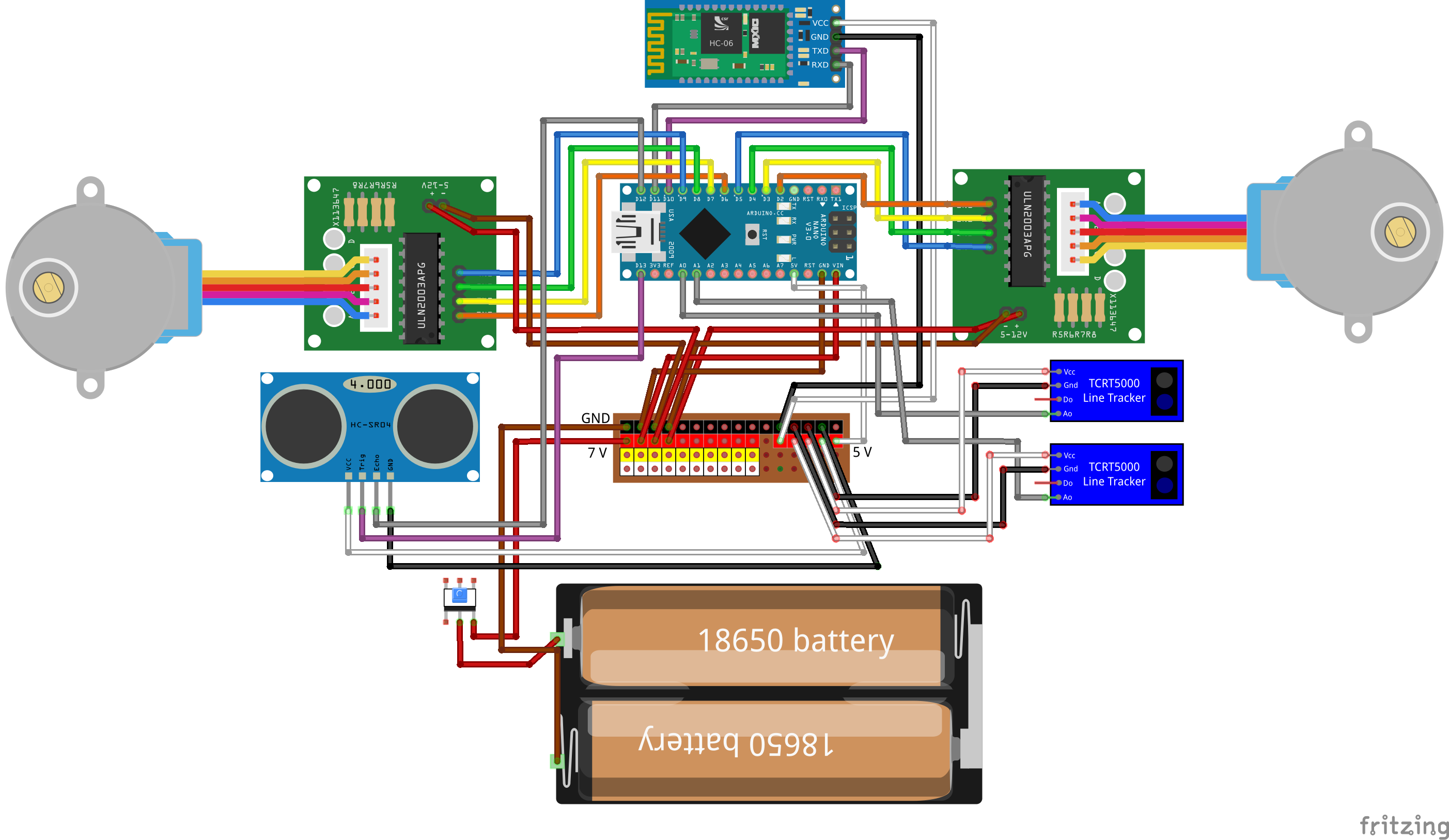
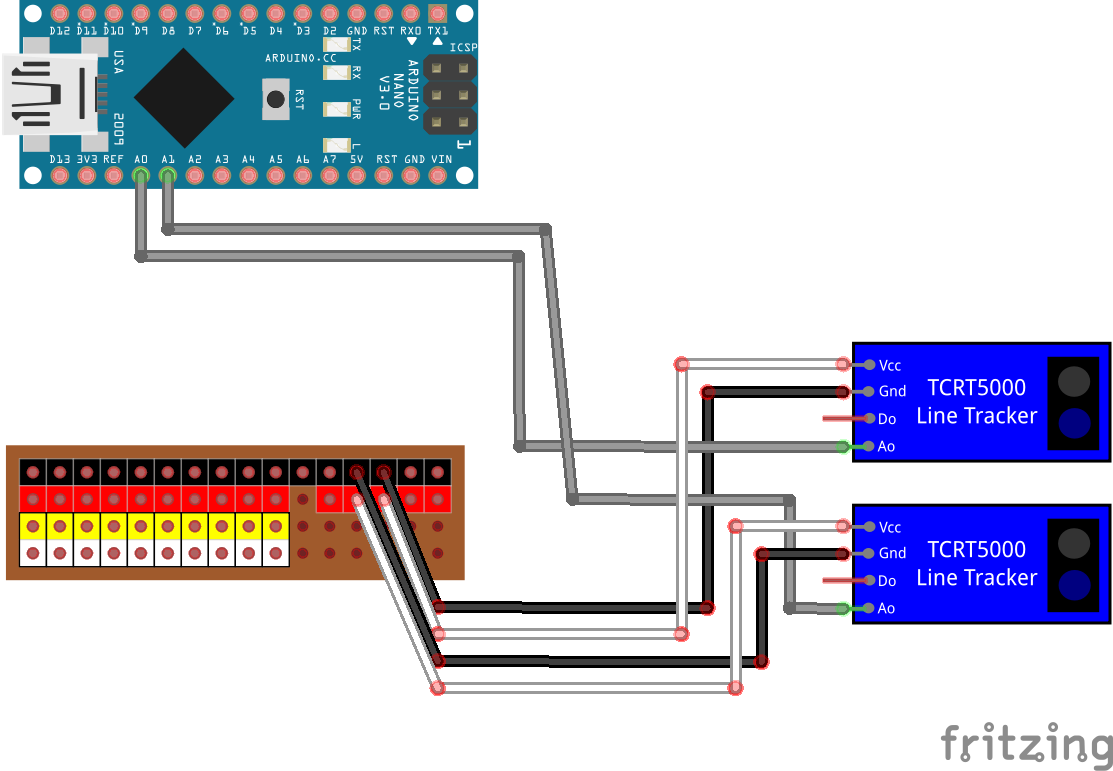
Esquema eléctrico completo
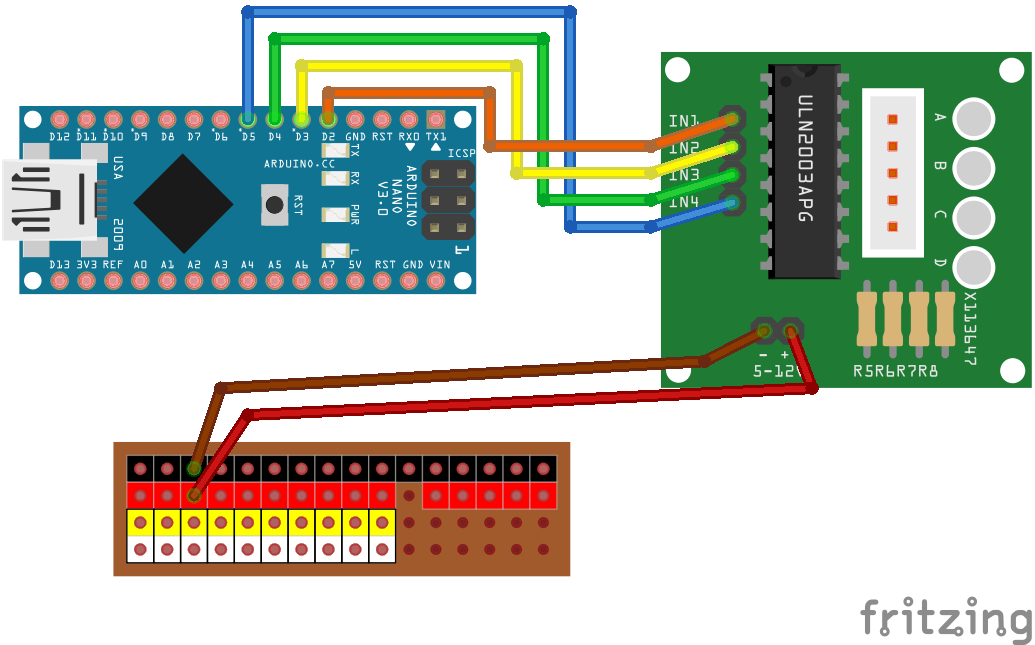
Aunque después vas a poder conocer cómo montar el robot paso a paso, aquí tienes el esquema eléctrico completo con la conexión de los componentes que va llevar incorporados el robot. Si necesitas ver la imagen más grande, puedes abrirla en una nueva pestaña con desde el menú del botón derecho del ratón.
Recursos necesarios
Materiales utilizados:
- 1 x Arduino Nano
- 18 x Cables Dupont 20 cm (recomiendo usar los mismos colores que puedes ver en esta guía)
- 16 x Cables Dupont 10 cm (recomiendo usar los mismos colores que puedes ver en esta guía)
- 1 x Placa de conexiones para robots Squitty. En el artículo Cómo construir una placa de conexiones para robótica puedes ver cómo construirla.
- 2 x Baterías 18650 recargables de 3,7 voltios
- 1 x Interruptor 7x7mm con bloqueo
- 1 x Módulo Bluetooth HC-06
- 2 x Motores paso a paso 28BYJ-48 con driver ULN2003
- 1 x Sensor de distancia por ultrasonidos HC-SR04
- 2 x Sensor Infrarrojo Siguelíneas TCRT5000
- 2 x Bridas estrechas
- 1 x Canica
- 2 x Tiras de Goma EVA
Piezas impresas en 3D:
Todas estas piezas y otras más puedes encontrarlas en la colección Squitty de Thingiverse. Ahí puedes encontrar piezas compatibles entre sí para que puedas construir el robot de manera personalizada, añadiendo, si lo deseas, otros componentes. Además, busca Turtle_Pointer.stl para encontrar los diseños de estas piezas y en base a ellas podrás crear otras nuevas, si lo deseas.
- 1 x Soporte placa Arduino (Arduino_Nano_Holder_Bottom.stl, Arduino_Nano_Holder_Middle.stl y Arduino_Nano_Holder_Top.stl)
- 1 x Soporte de baterías 18650 (Battery_18650_Holder_Bottom.stl y Battery_18650_Holder_Top.stl)
- 1 x Soporte interruptor 7x7mm (Power_Switch.stl)
- 2 x Escuadra 1x1 (Angle_1x1.stl)
- 2 x Soporte motor 28BYJ-48 (Motor_28BYJ-48_Holder_A y Motor_28BYJ-48_Holder_B)
- 1 x Soporte de canica (Marble_Holder.stl)
- 1 x Guía puntero (Turtle_Pointer.stl)
- 2 x Tira de 3 orificios (Strip_L3.stl)
- 1 x Tira de 5 orificios (Strip_L5.stl)
- 1 x Placa de 5x2 orificios (Shield_5x2.stl)
- 1 x Placa de 6x5 orificios y 2 mm de grosor (Shield_6x5_XLstl)
- 1 x Soporte para sensor de distancia HC-SR04 (HC-SR04_Holder_A y HC-SR04_Holder_B)
- 1 x Soporte para dos sensores siguelíneas TCRT5000 (LineTracker_TCRT5000_Holder_Bottom.stl y LineTracker_TCRT5000_Holder_Top.stl)
- 2 x Rueda 90 mm (Wheel_D90.stl)
- 2 x Adaptador para eje de motor 28BYJ-48 (Axis_Wheel_28BYJ-48_3.30.stl). Si al imprimirlo no se ajusta bien, puedes editar el diseño en Tinkercad para que se ajuste mejor a tu impresora: https://www.tinkercad.com/things/iqGGFXG1eTg-squitty-wheel-for-28byj-48-stepper-motor
- 52 x Tuercas (Tuerca.stl)
- 42 Tornillos 8 mm (Tornillo_L8.stl)
- 2 x Tornillos 16 mm (Tornillo_L16.stl)
- 8 x Tornillos 25 mm (Tornillo_L25.stl)
- 2 x Cilindros 2,8 mm (Washer_H28.stl)
- 2 x Cilindros 18 mm (Washer_H180.stl)
Herramientas:
- Soldador para pegar las tuercas.
- Alicates de punta fina para apretar los tornillos.
Instrucciones de montaje paso a paso
Preparación de la placa Arduino
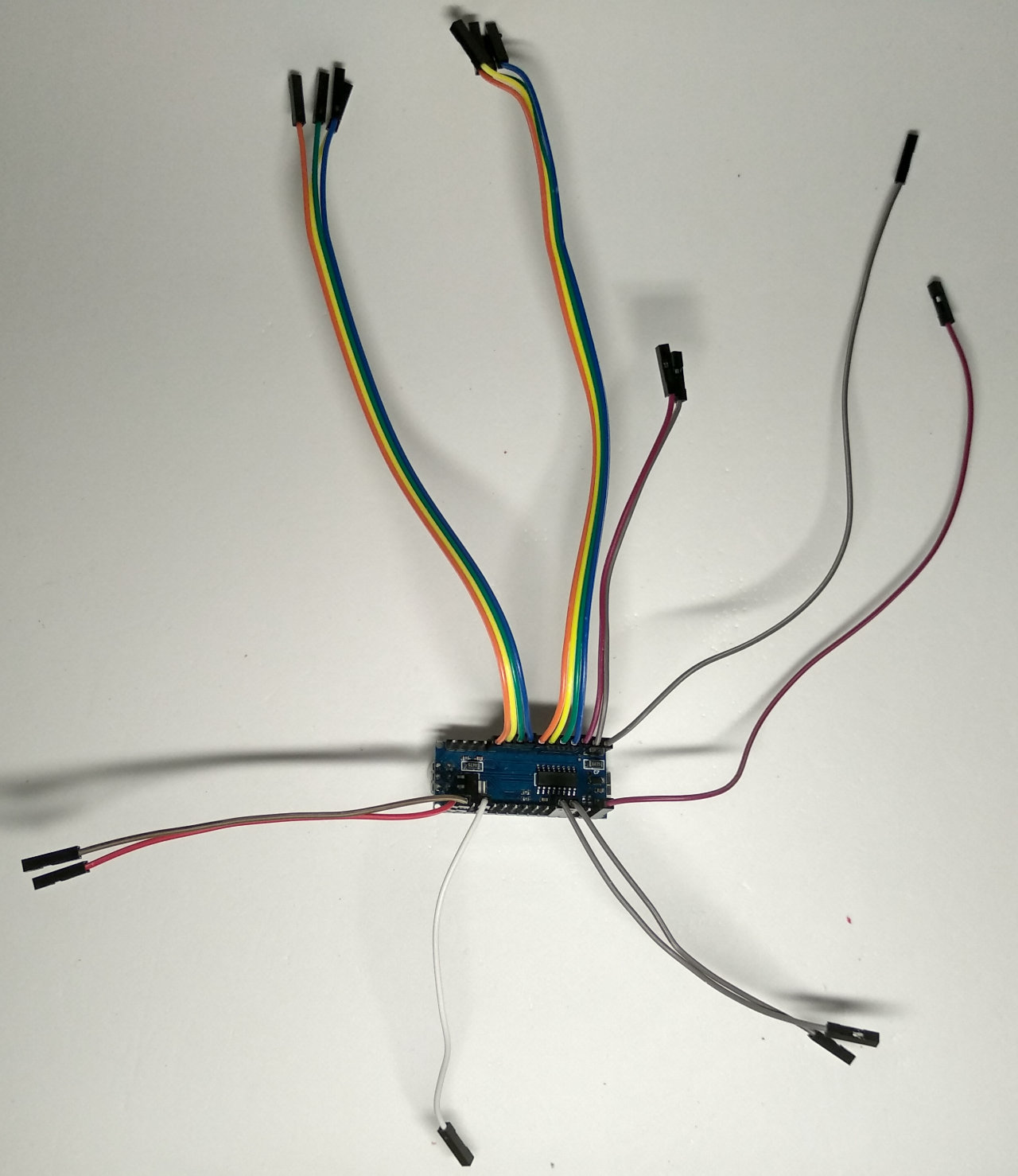
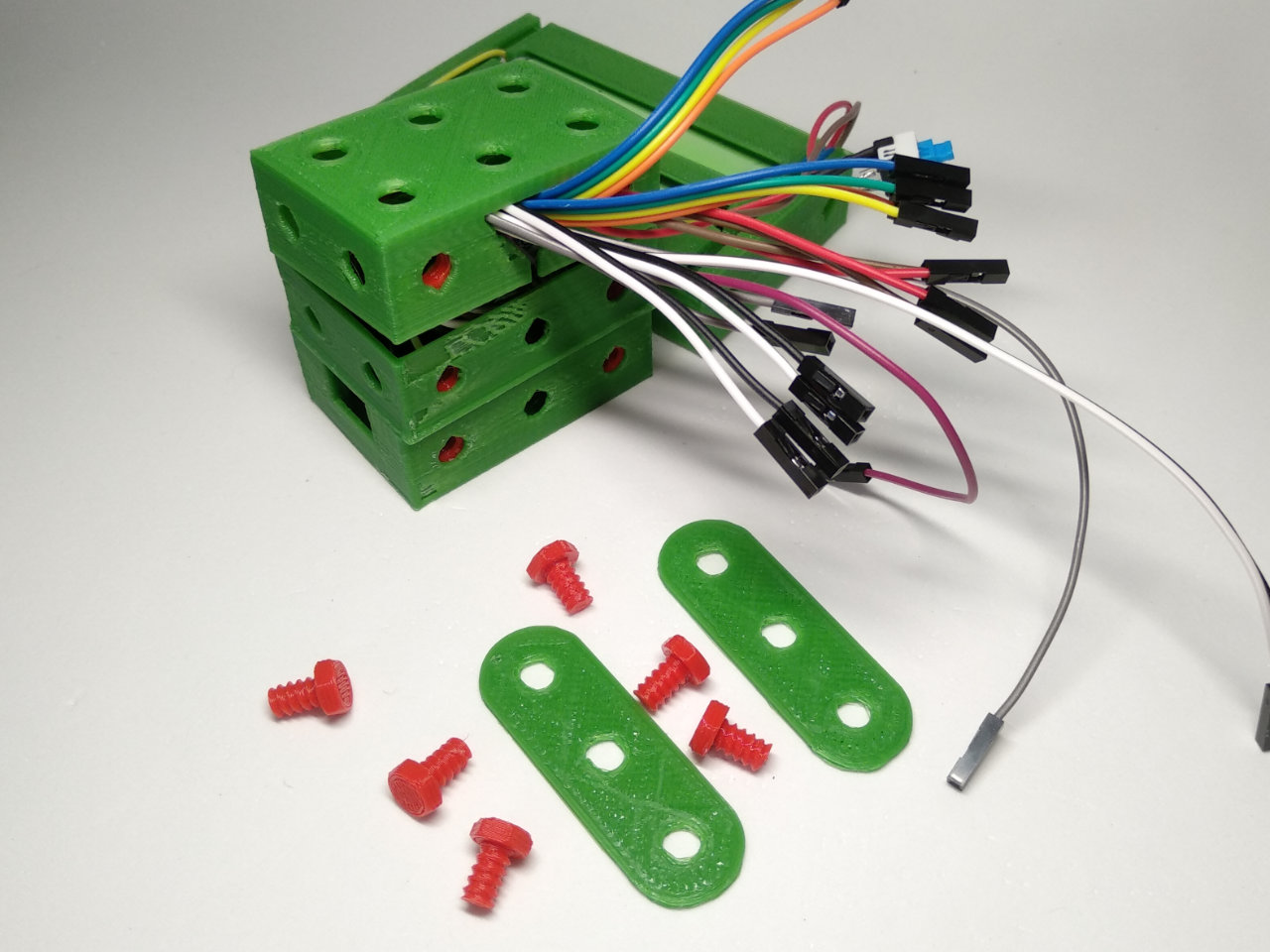
Puedes empezar colocando los cables que hay conectar a la placa Arduino. Observa el siguiente esquema para saber en qué pin debes colocar cada cable. Ten en cuenta que en el esquema aparecen más largos los cables que deben ser de 20 cm, y más cortos los de 10cm. Te recomiendo usar los mismos colores que los mostrados en el esquema para que te resulte más fácil hacer todas las conexiones posteriores.
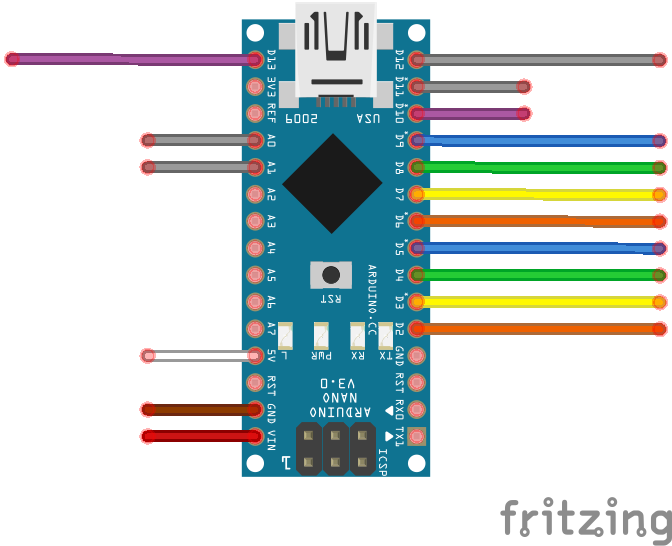
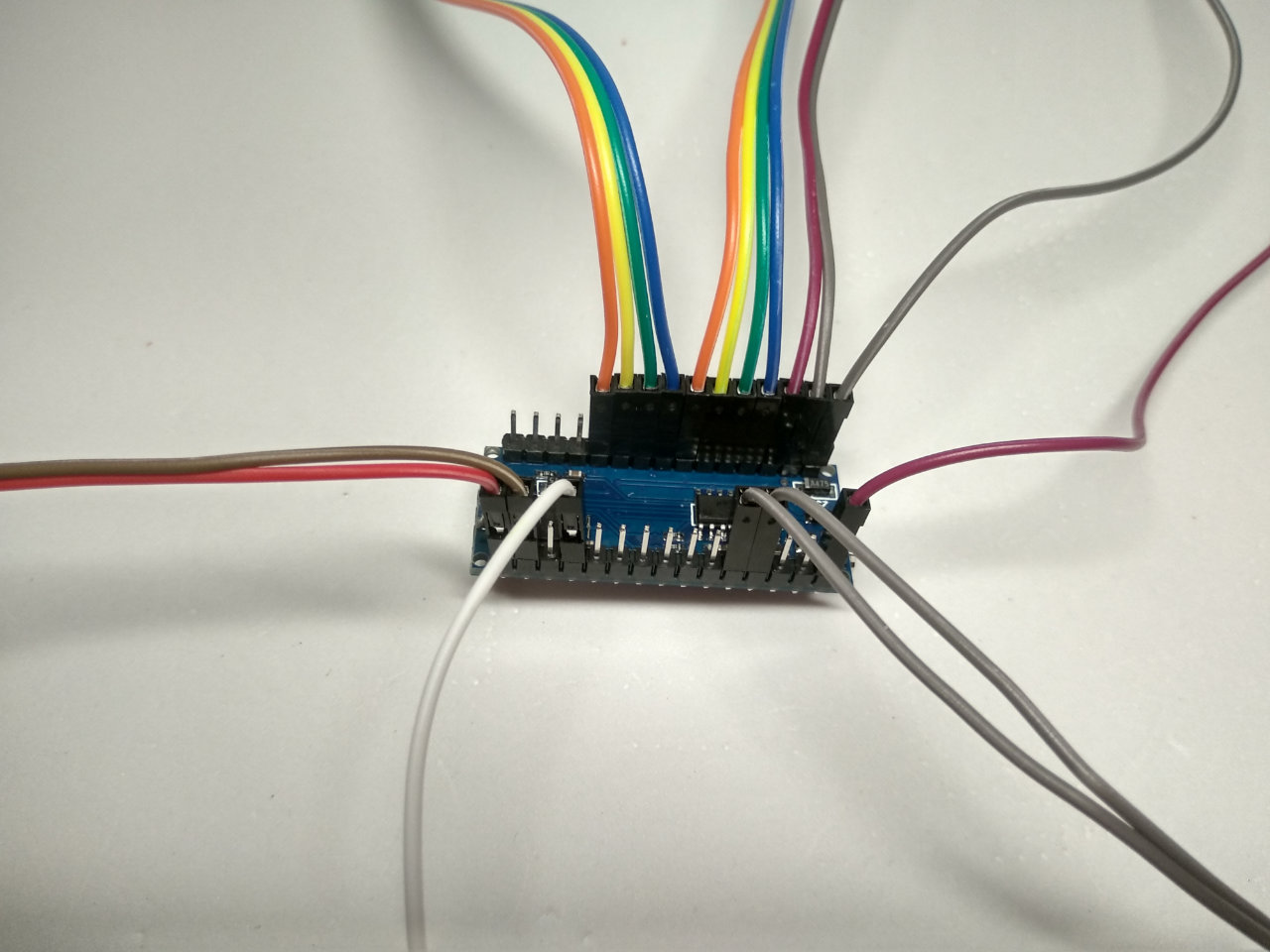
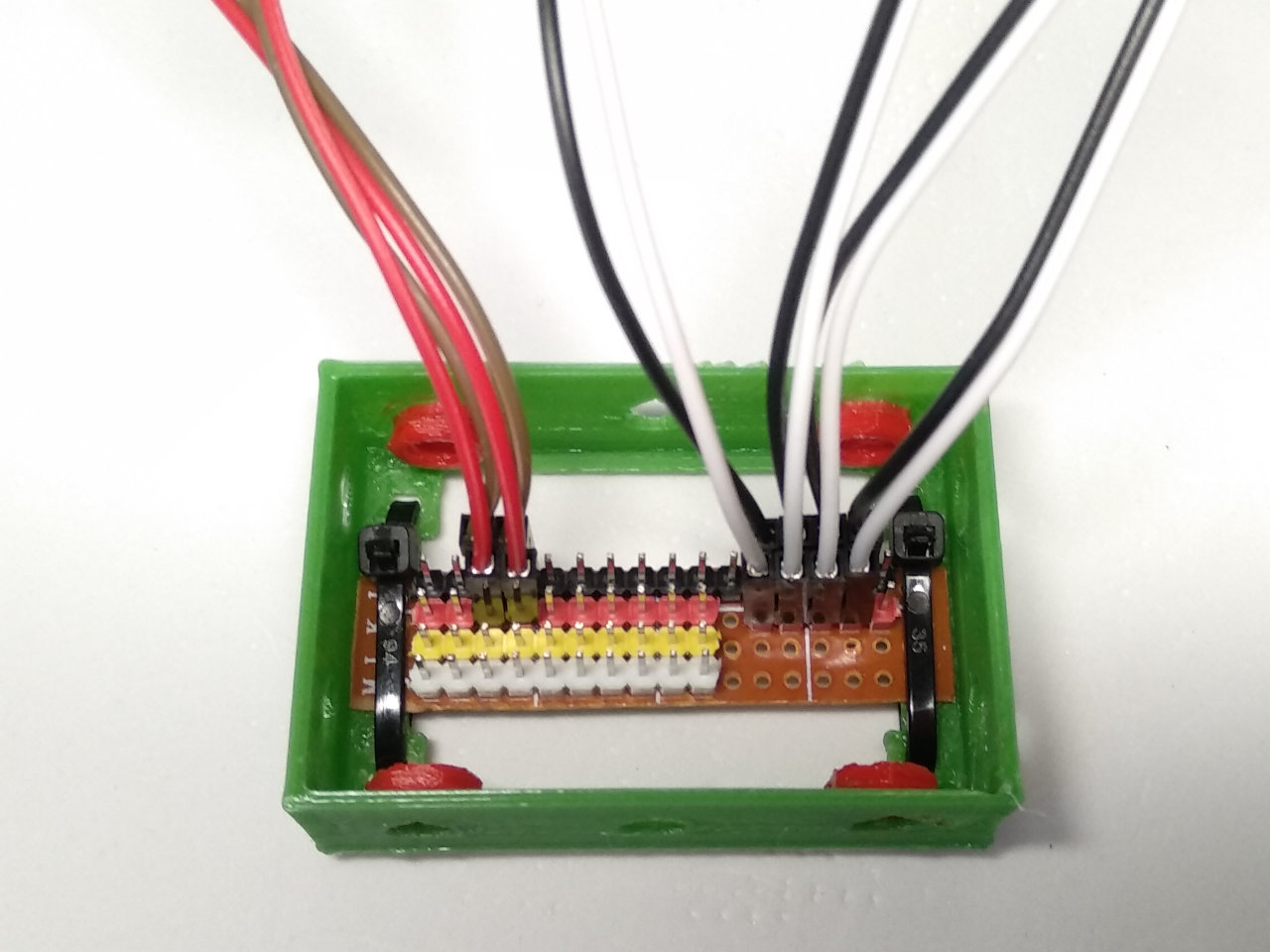
En las siguientes fotos puedes ver cómo podrían quedar los cables conectados. Ten en cuenta que en el esquema de conexiones de la imagen anterior se muestra la parte inferior de la placa, y en las fotos se está mostrando la parte superior, donde se encuentran los pines, por lo que la imagen del esquema respecto a las fotos se ve al revés.
Te recomiendo utillizar alguna marca en el bloque de 4 cables que van a los pines D2 a D5, para distinguirlos de los otros 4 que van a los pines D6 a D9, ya que los primeros serán para el motor derecho del robot y los otros para el motor izquierdo.
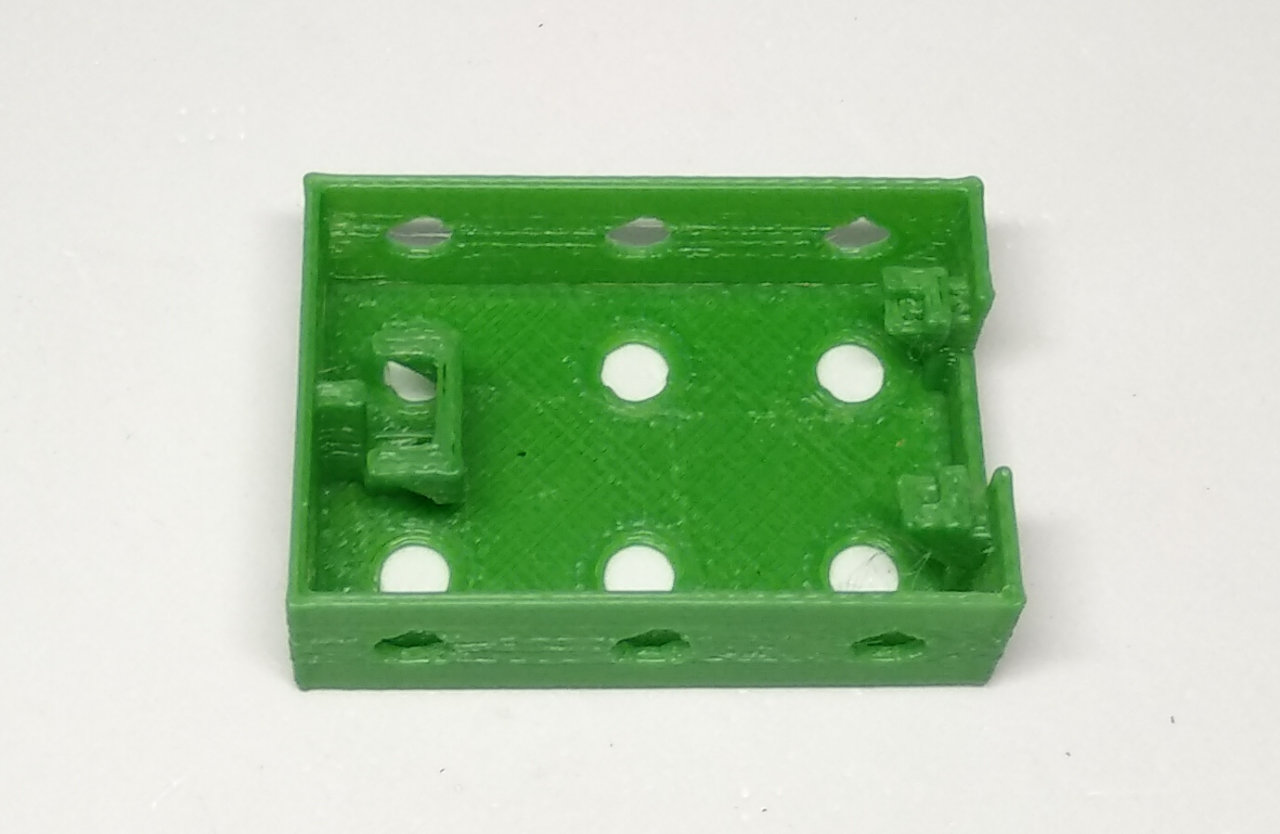
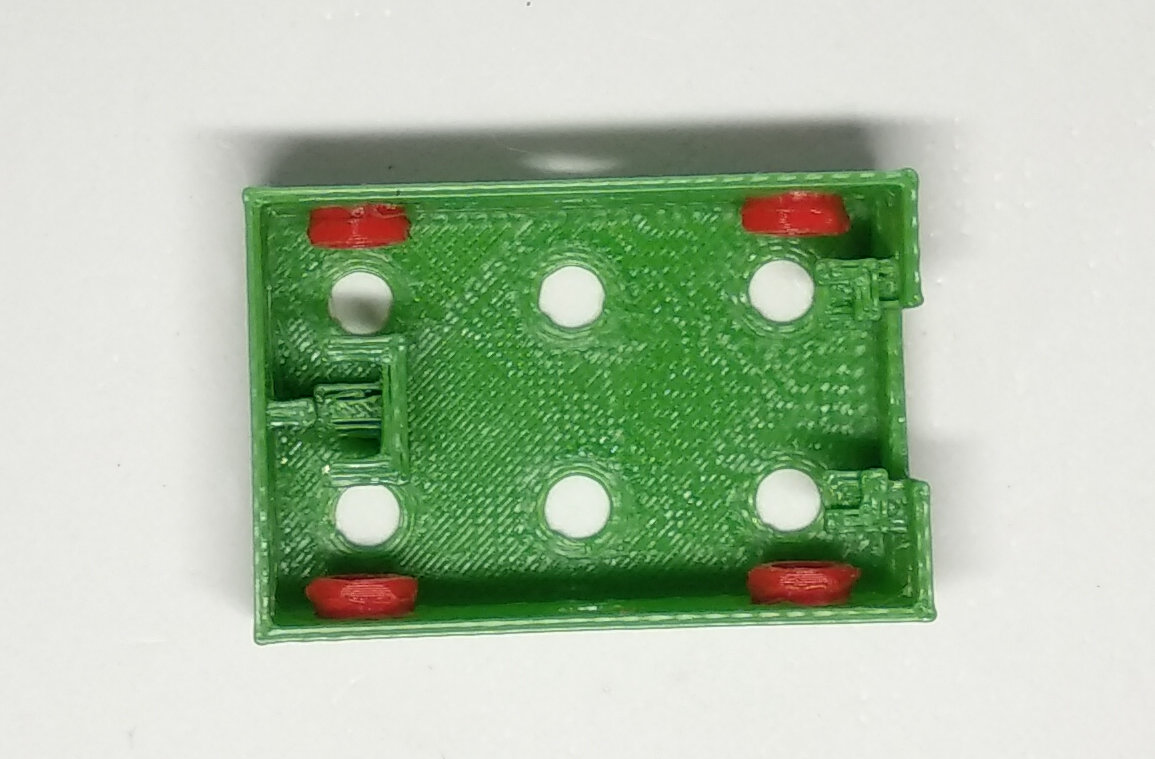
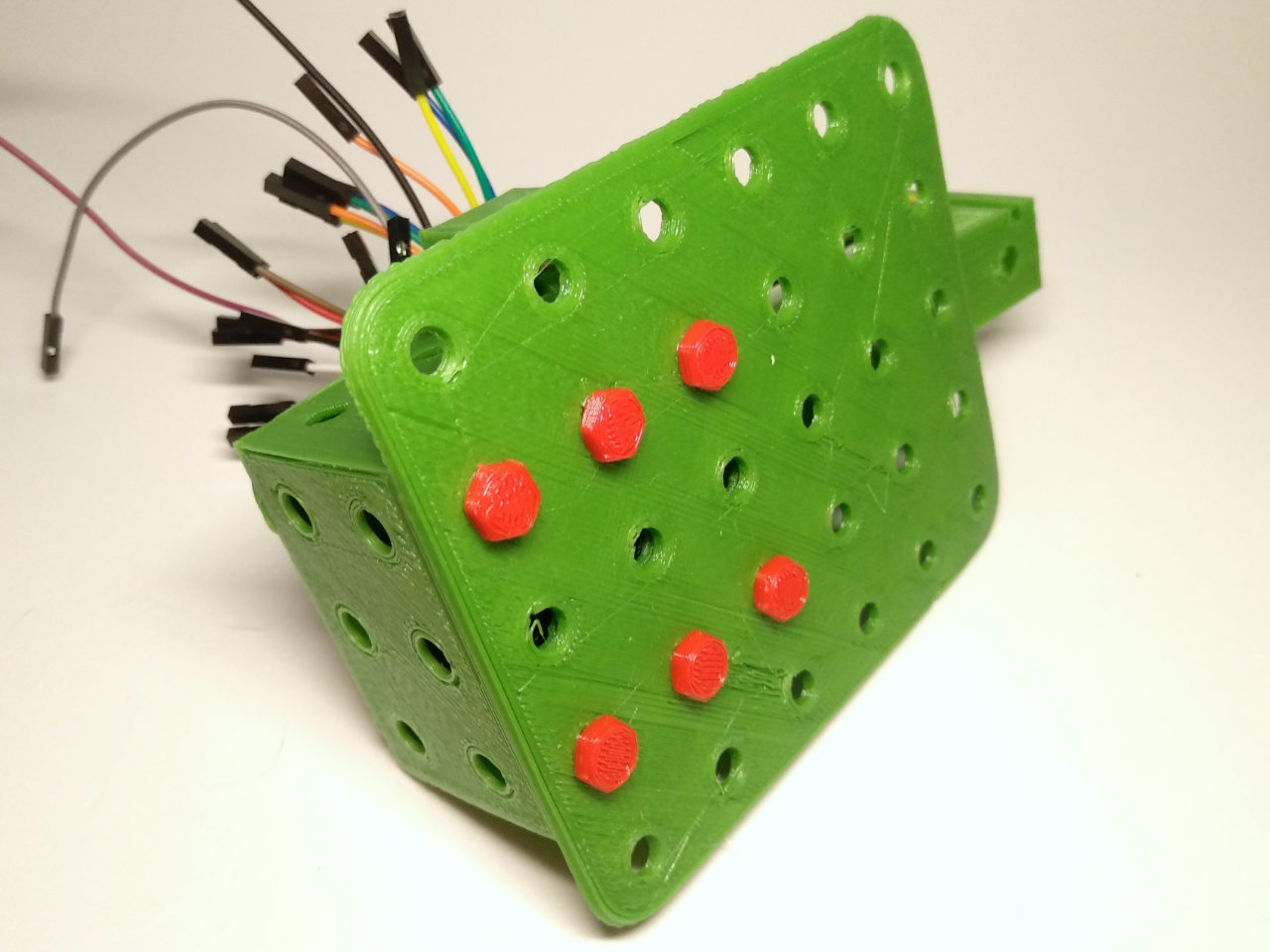
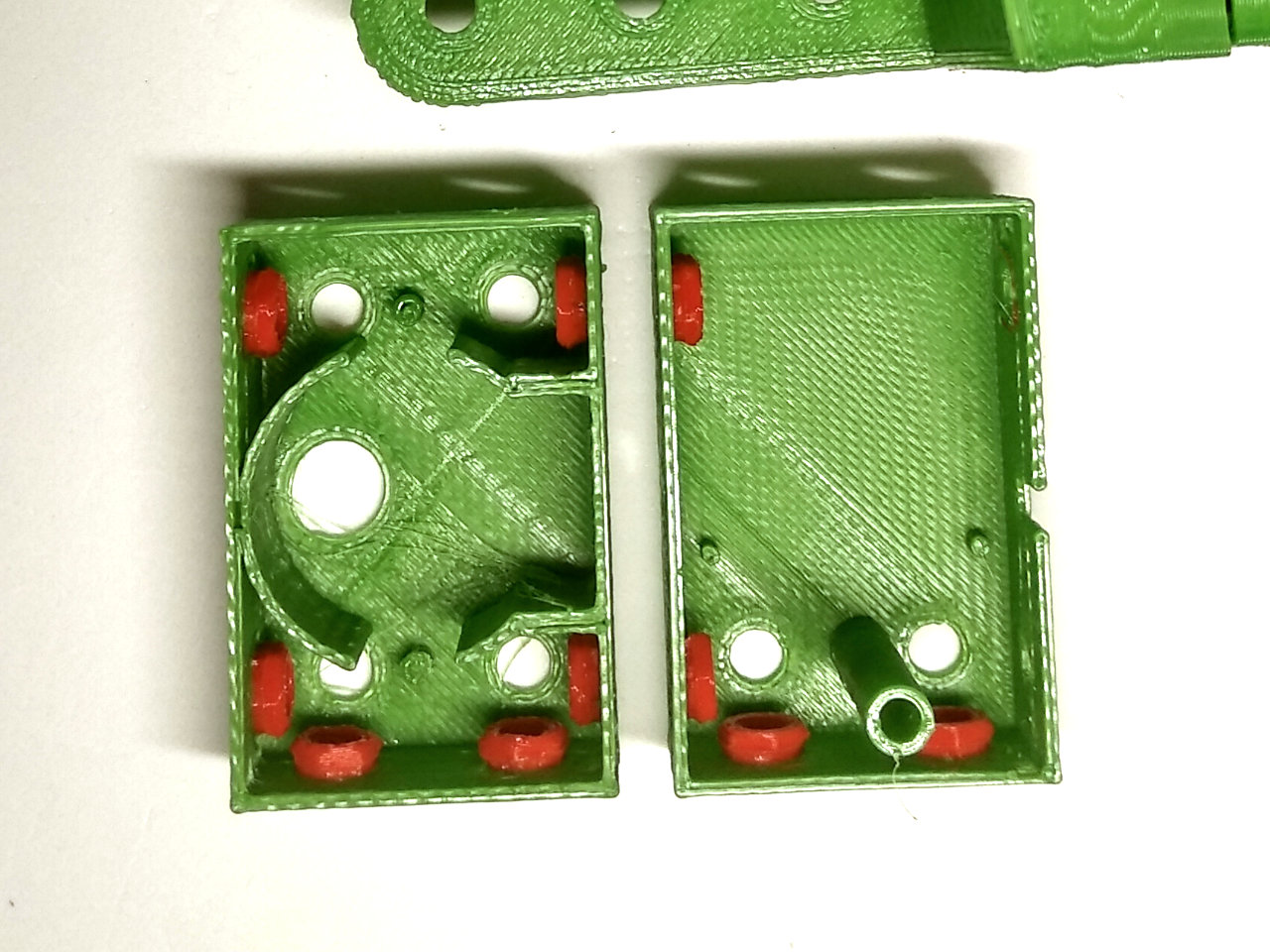
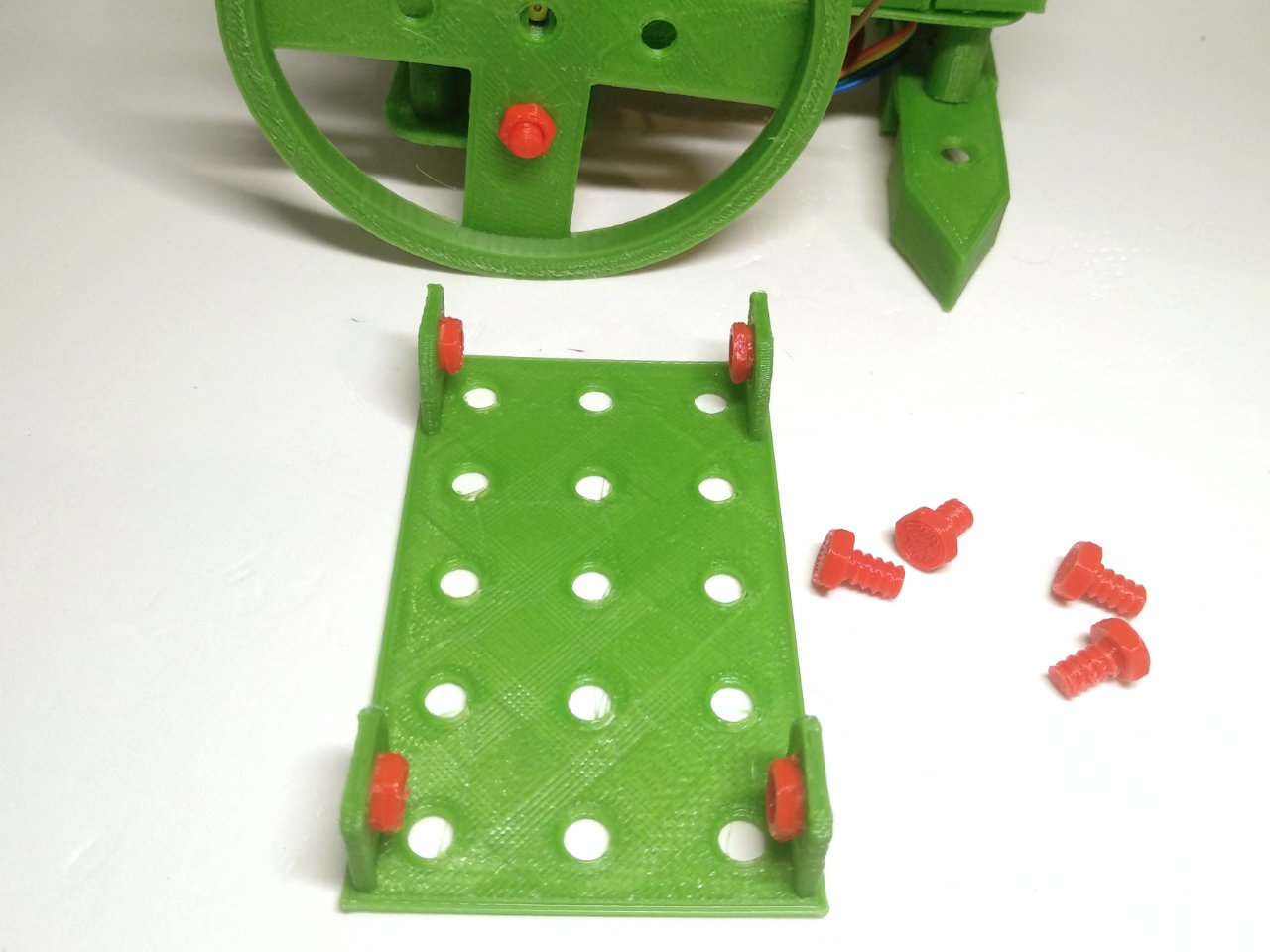
Prepara el soporte de la placa Arduino y pega 4 tuercas en los lugares que puedes ver en la foto.
Para pegar las tuercas recomiendo usar un soldador para derretir sus contornos, lo cual podrás hacer más fácilmente si dejas provisionalmente las tuercas enroscadas con sus tornillos correspondientes y aprovechas para derretir el contorno.
Coloca la placa Arduino en su soporte para que quede como en la imagen:
Preparación de la placa de conexiones
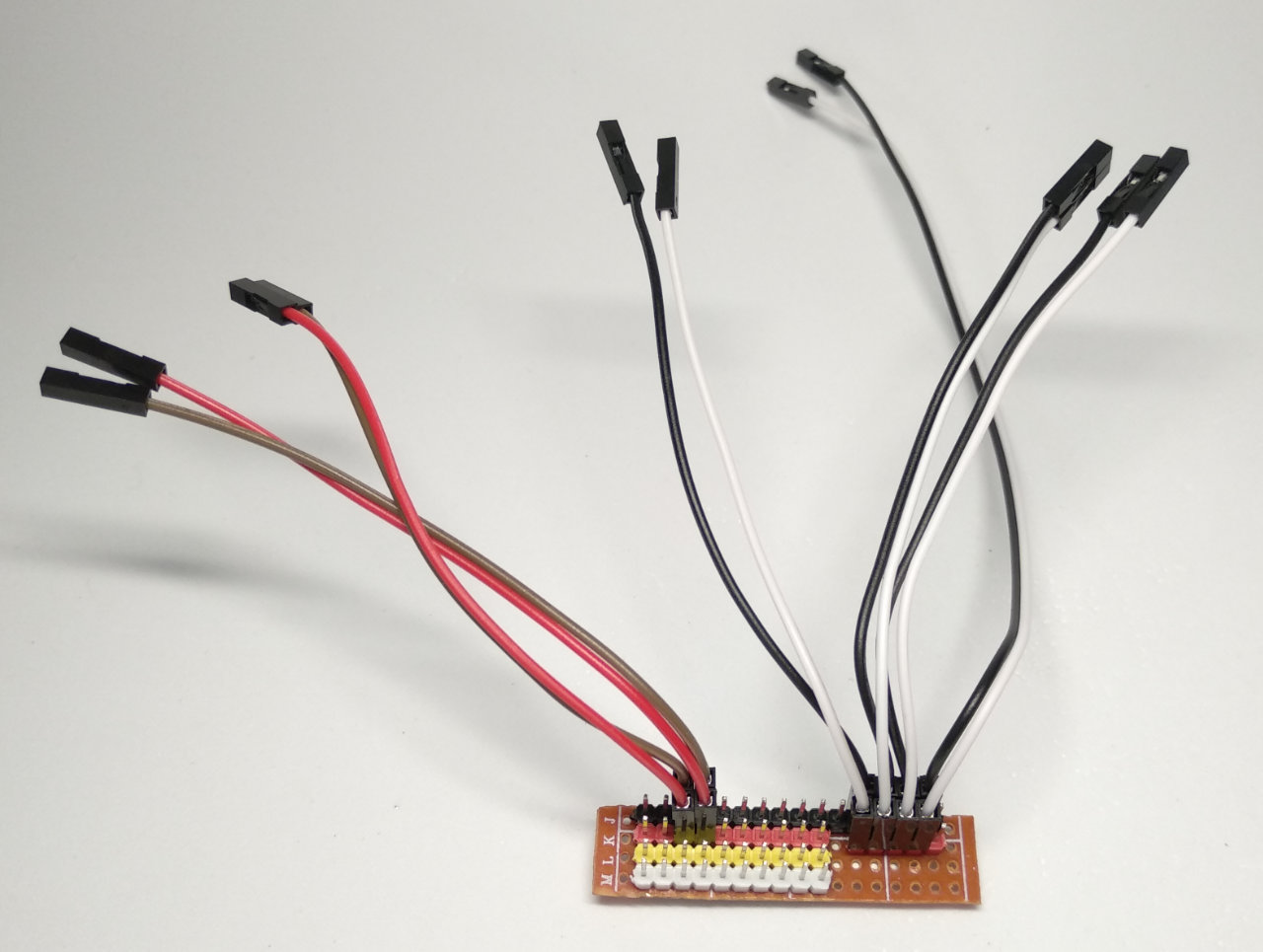
Conecta en la placa de conexiones (en el artículo Cómo construir una placa de conexiones para robótica puedes ver cómo construirla) los cables que se muestran en el siguiente esquema. Ten en cuenta que en el esquema aparecen más largos los cables que deben ser de 20 cm, y más cortos los de 10 cm. Te recomiendo usar los mismos colores que los mostrados en el esquema para que te resulte más fácil hacer todas las conexiones posteriores.

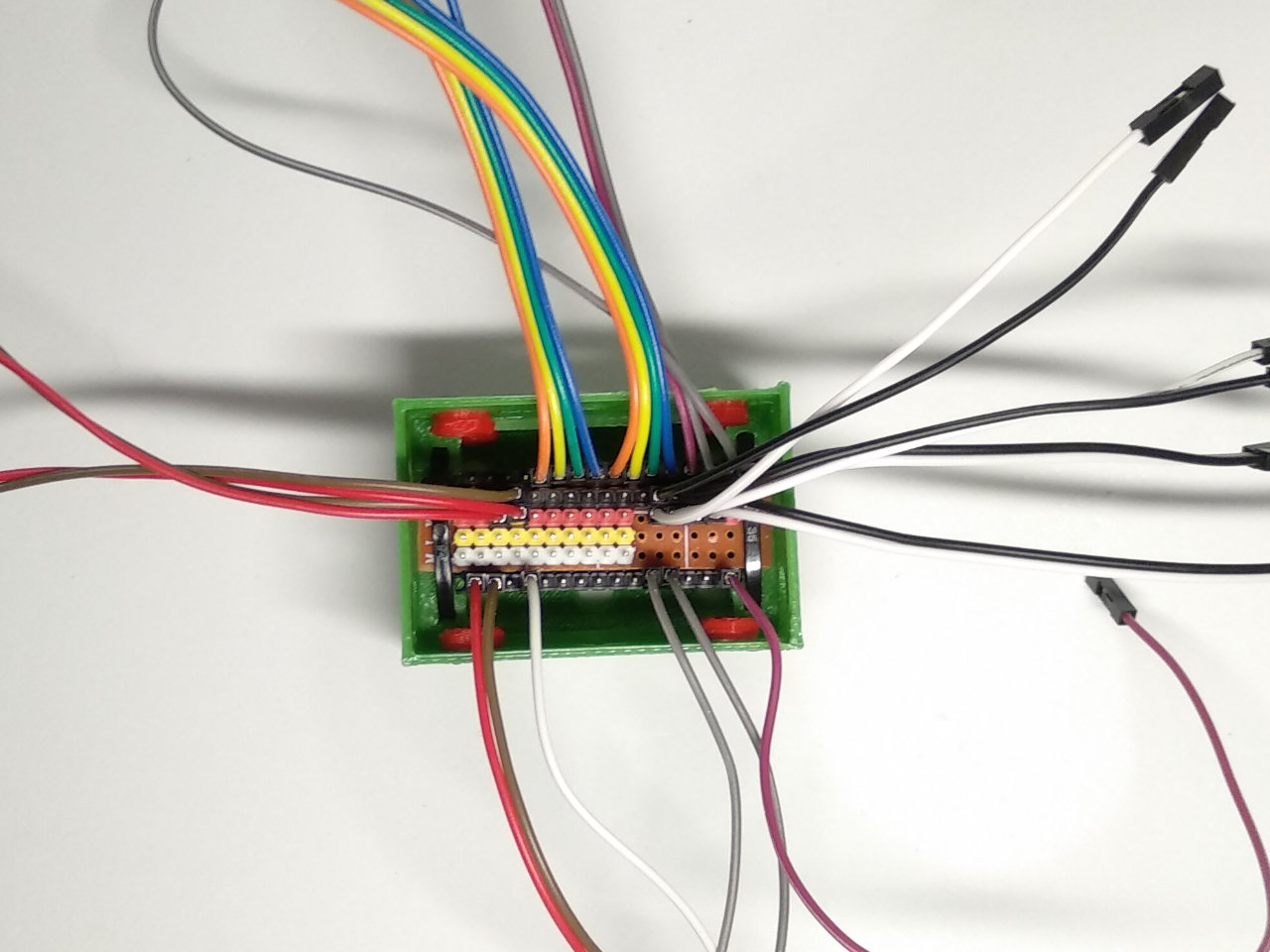
En la foto puedes ver cómo podría quedar:
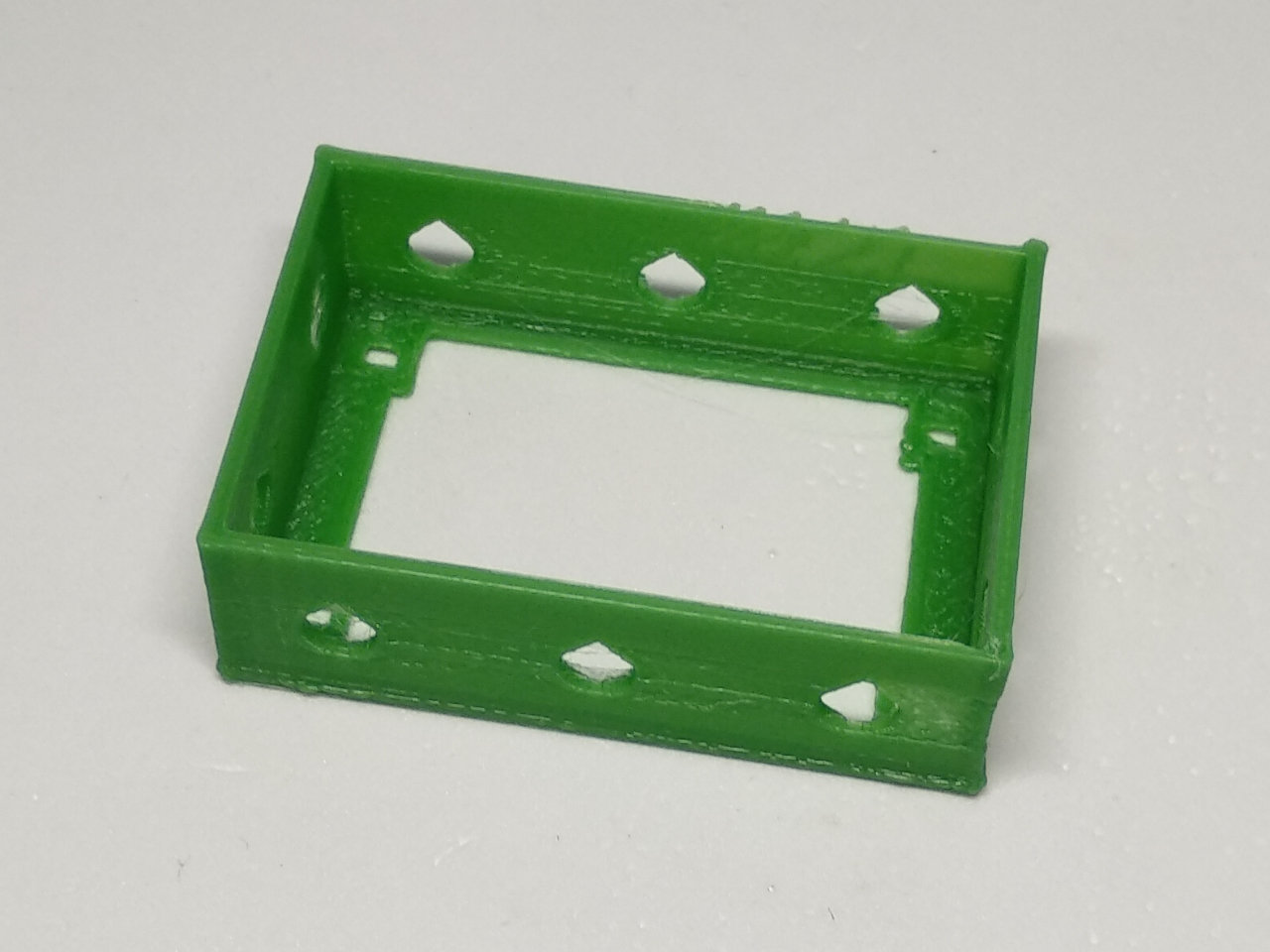
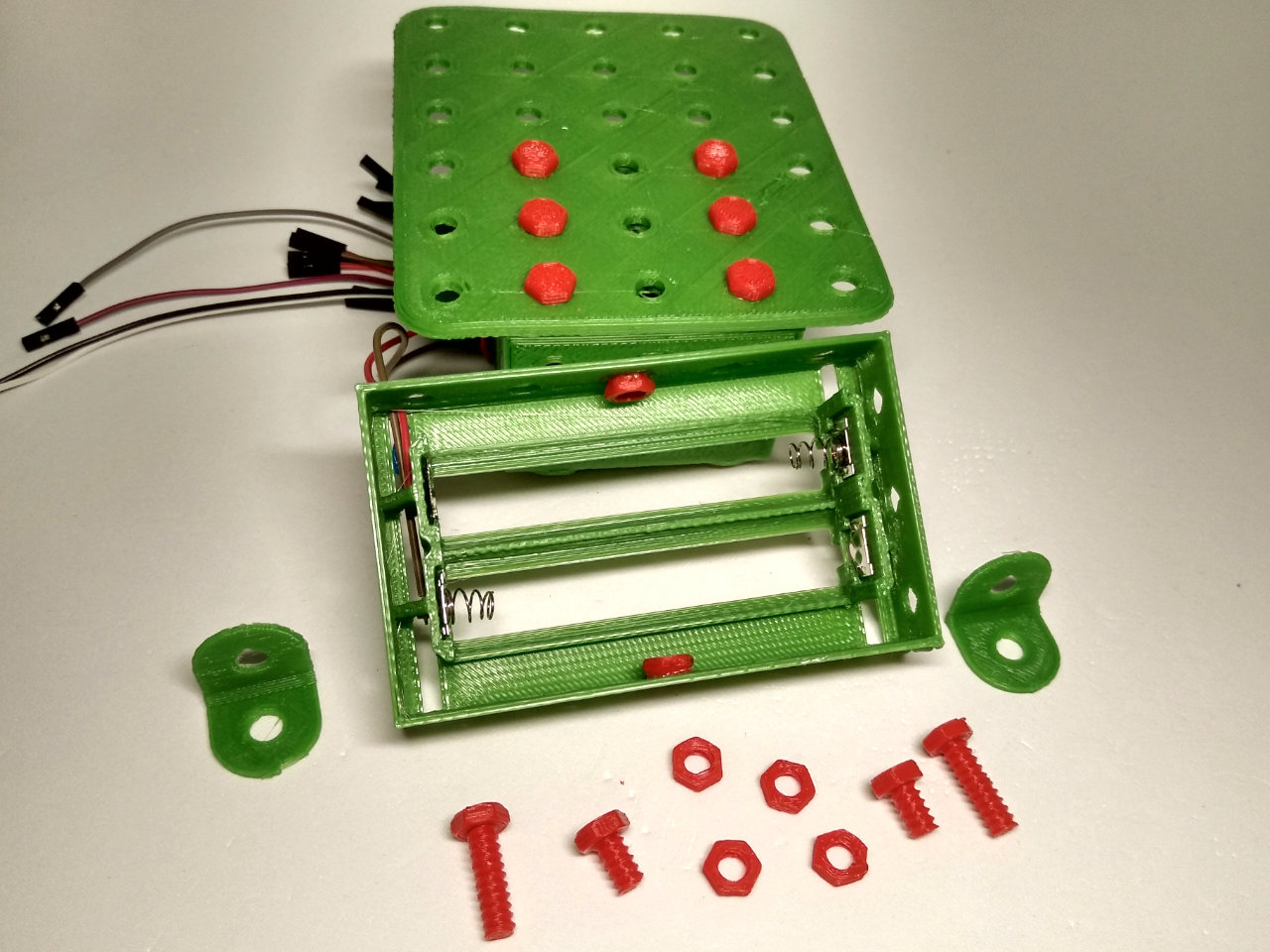
Prepara el soporte intermedio de la placa Arduino para colocar en ella la placa de conexiones. Pega 4 tuercas en los lugares que puedes ver en la foto:
Prepara 2 bridas para fijar la placa de conexiones al soporte.
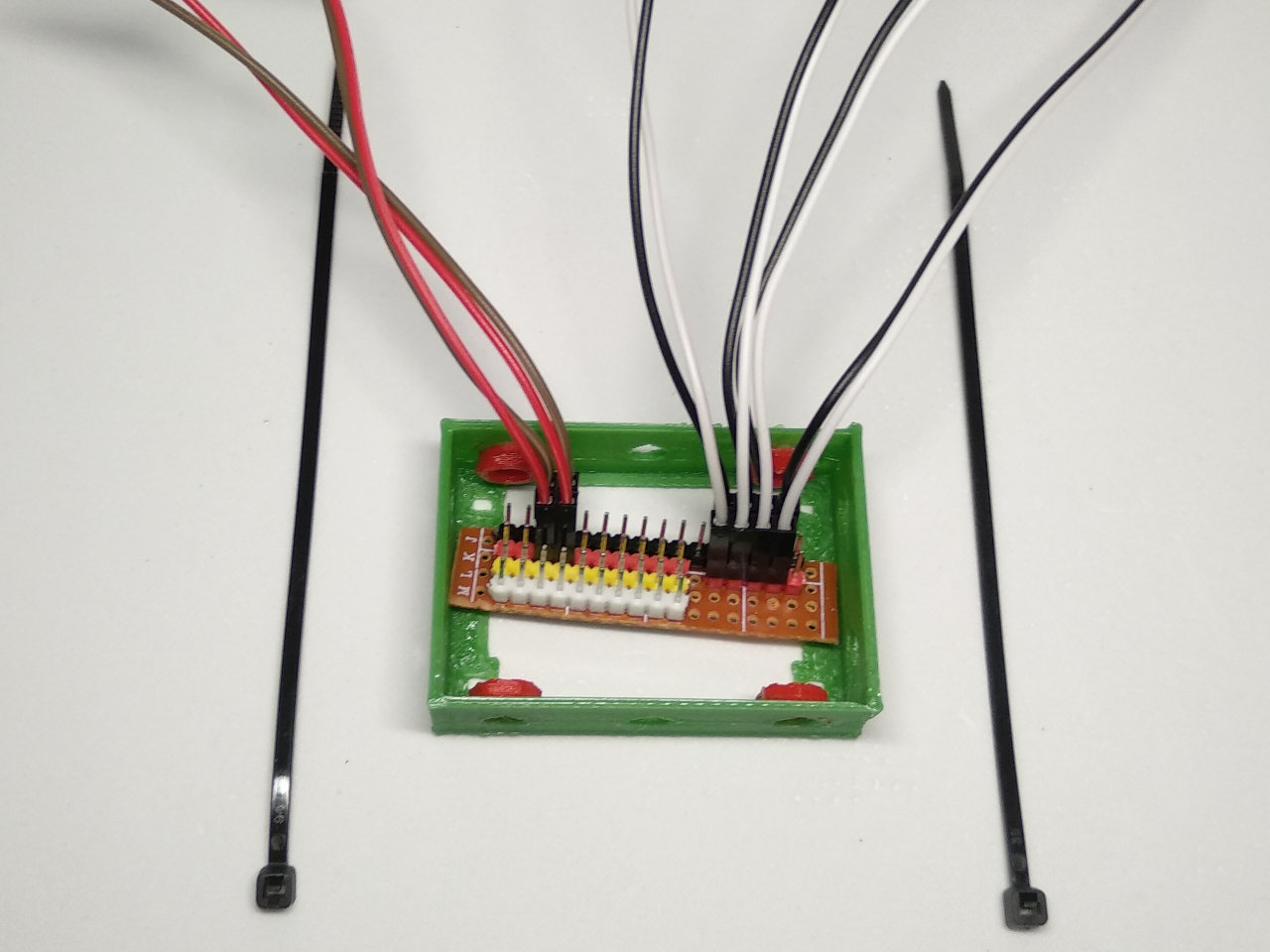
Introduce las bridas por los huecos que dispone el soporte intermedio dejando la placa de conexiones colocada en la parte central. Corta los extremos sobrantes de las bridas.
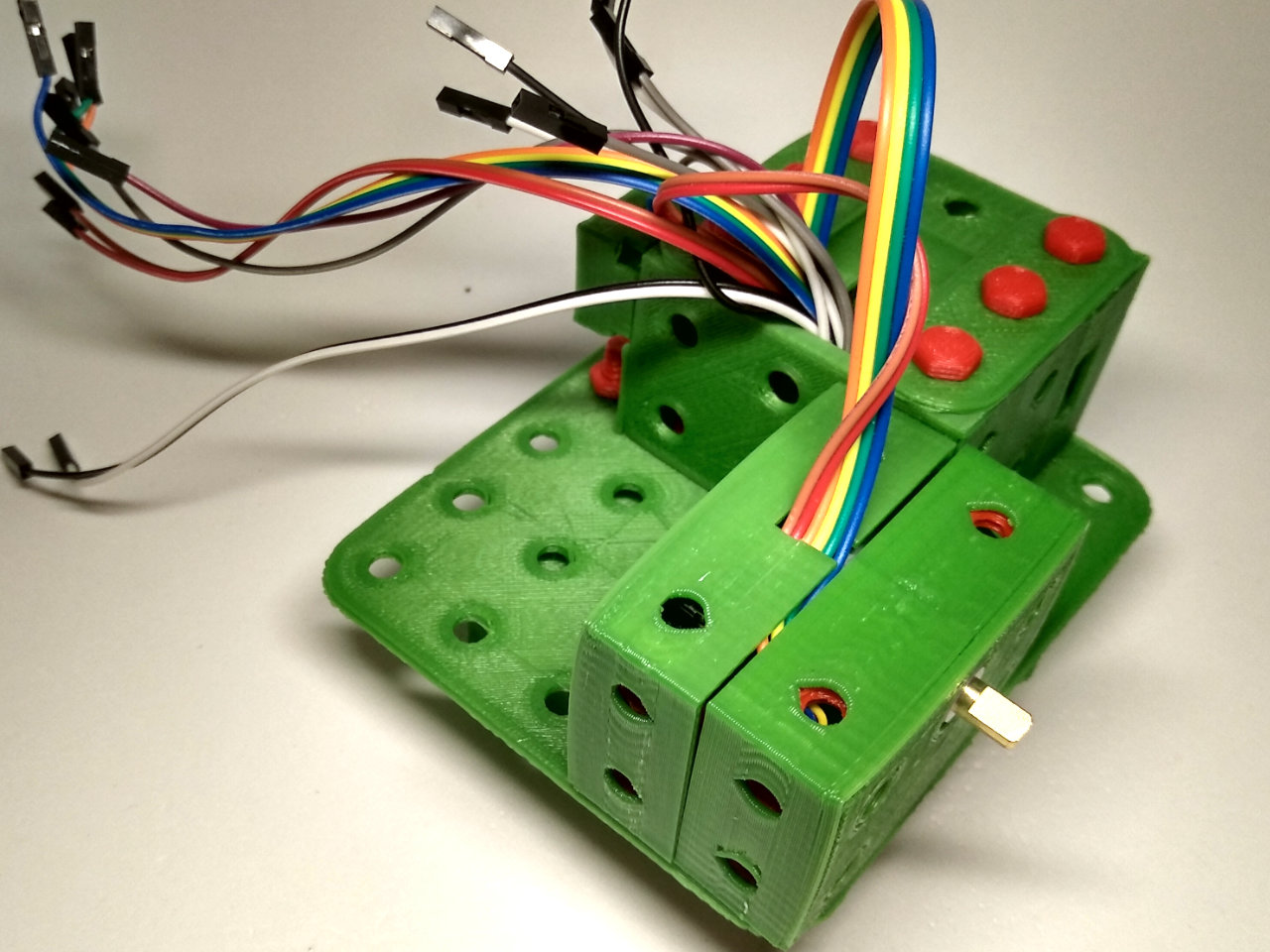
Une el soporte inferior en el que se encuentra la placa Arduino con el soporte intermedio en el que está colocada la placa de conexiones. Introduce los cables que están conectados a la placa Arduino por los laterales del soporte intermedio.
Debería quedar como en la siguiente foto:
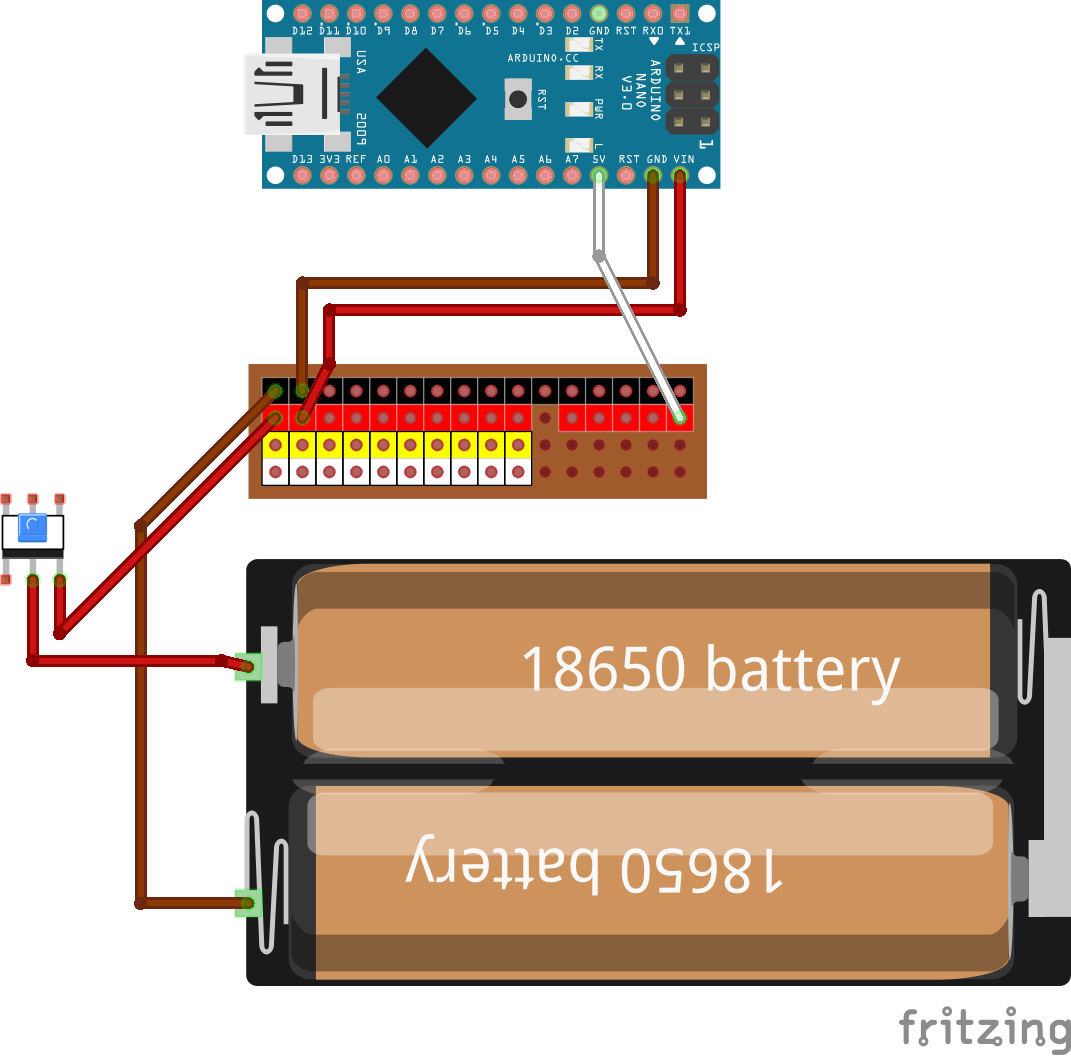
Alimentación eléctrica
Para suministrar corriente eléctrica a la placa Arduino, a los motores, y al resto de sensores y componentes eléctricos, se van a utilizar 2 baterías modelo 18650 recargables de 3,7 voltios cada una, colocadas en serie, con lo que se conseguirá un voltaje superior a los 7 voltios. Con esto se consigue que el robot sea autónomo, usando baterías recargables en vez de 4 pilas estándar de tipo AA que también se podrían utilizar, pero que económicamente y ecológicamente serían menos rentables. Además este tipo de baterías son fácilmente extraíbles y sustituibles cuando se descarguen.
Para colocar las baterías se debe usar el soporte que está diseñado en este sitio web para todos los robots del proyecto Squitty. En el artículo Guía de montaje del soporte de baterías 18650 para robots Squitty puedes ver cómo se deben hacer las conexiones y colocar los elementos que lleva.
Hay que realizar las siguientes conexiones:
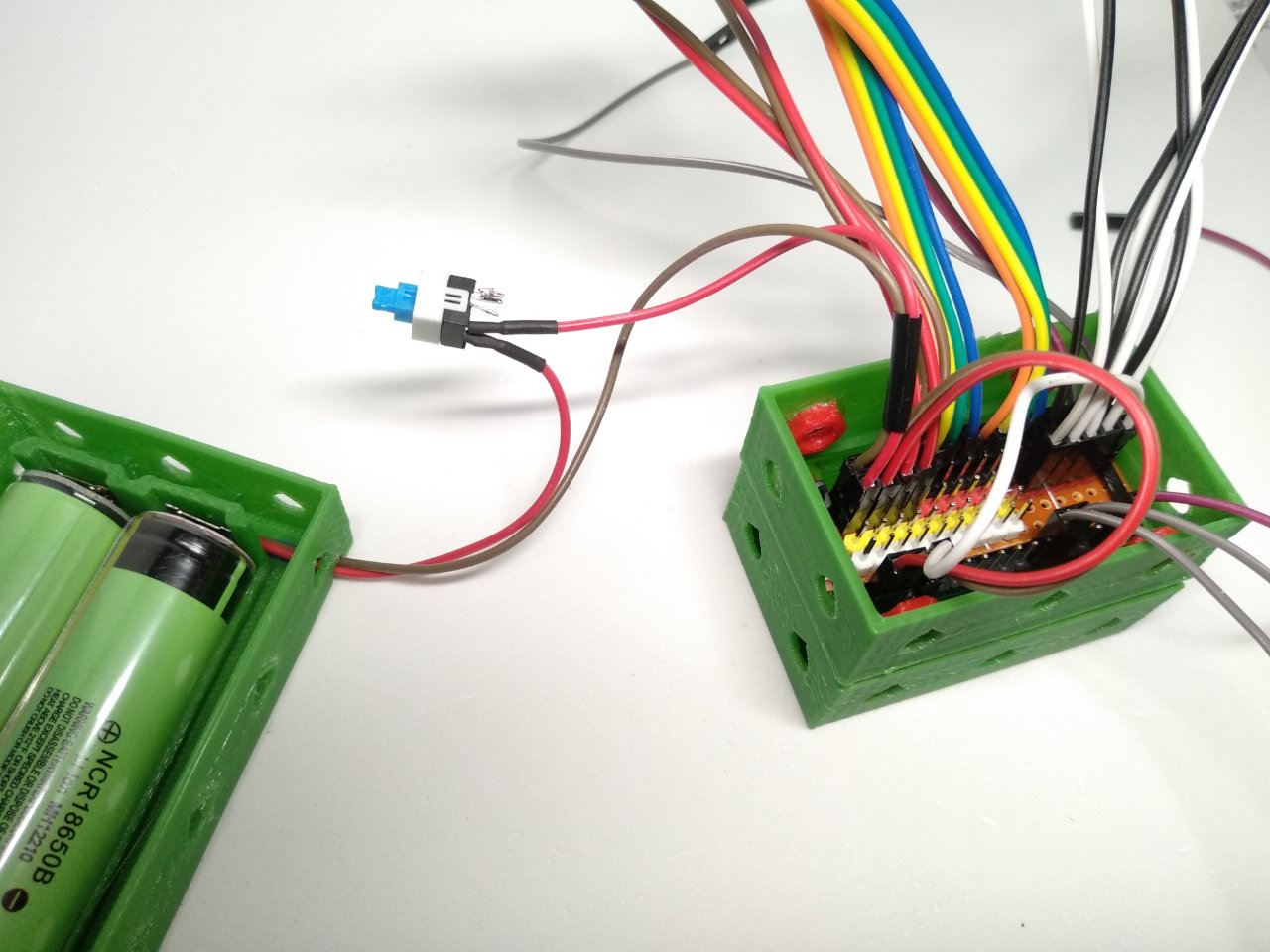
- Conecta el soporte de las baterías 18650 a los pines negro y rojo de la parte izquierda de la placa de conexiones (donde se conectarán los motores).
- Utiliza 2 cables dupont hembra-hembra de 10 cm (procura utilizar los mismos colores que en el esquema, rojo y marrón) para conectar la fila de pines negros de la placa de conexiones al pin GND de la placa Arduino. Conecta también la fila de pines rojos de la parte izquierda (donde has conectado las baterías) de la placa de conexiones al pin VIN de la placa Arduino.
- Conecta la fila de pines rojos de la parte derecha de la placa de conexiones al pin 5V de la placa Arduino. Con esta conexión se consigue alimentar con 5 voltios toda la fila de pines rojos del lado derecho.
En esta foto puedes ver un montaje real de este proceso:
Conexión del módulo Bluetooth HC-06
Para que el robot pueda ser controlado remotamente por un dispositivo remoto, como un teléfono móvil, se le puede añadir al robot un módulo Bluetooth HC-06.
El módulo consta de 4 pines que debes conectar del siguiente modo:
- VCC: a la fila de pines rojos del lado derecho (5V) de la placa de conexiones.
- GND: a la fila de pines negros (GND) de la placa de conexiones.
- TXD: al pin digital 10 (D10) de la placa Arduino.
- RXD: al pin digital 11 (D11) de la placa Arduino (se podrían conectar los pines TXD y RXD a otros pines digital que estuvieran libres, pero habría que hacer ligeros cambios en la programación posterior del robot).
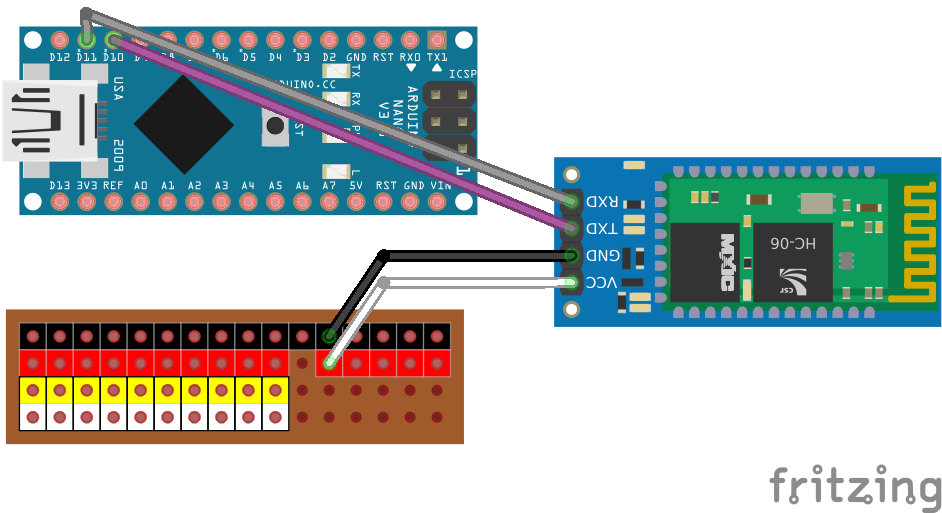
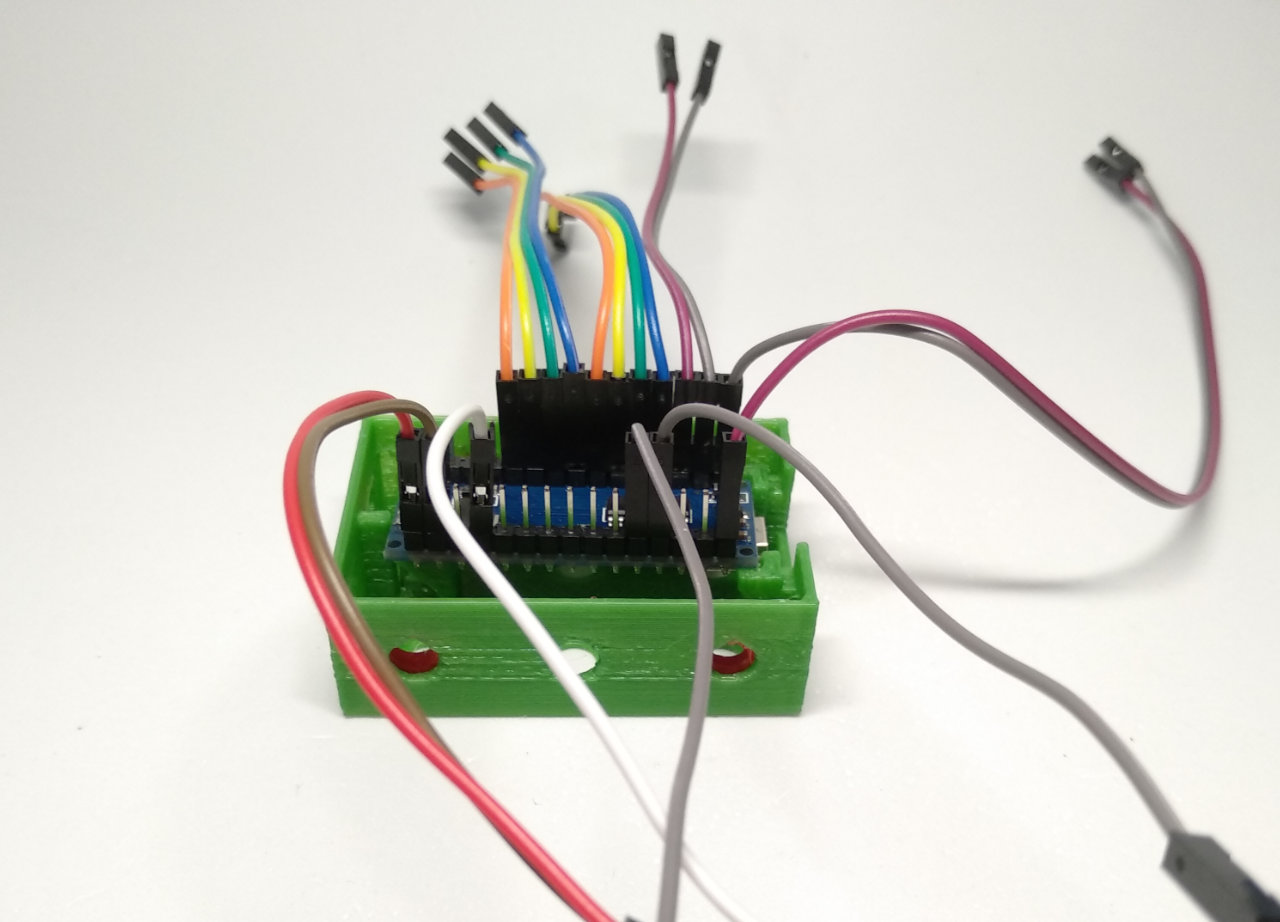
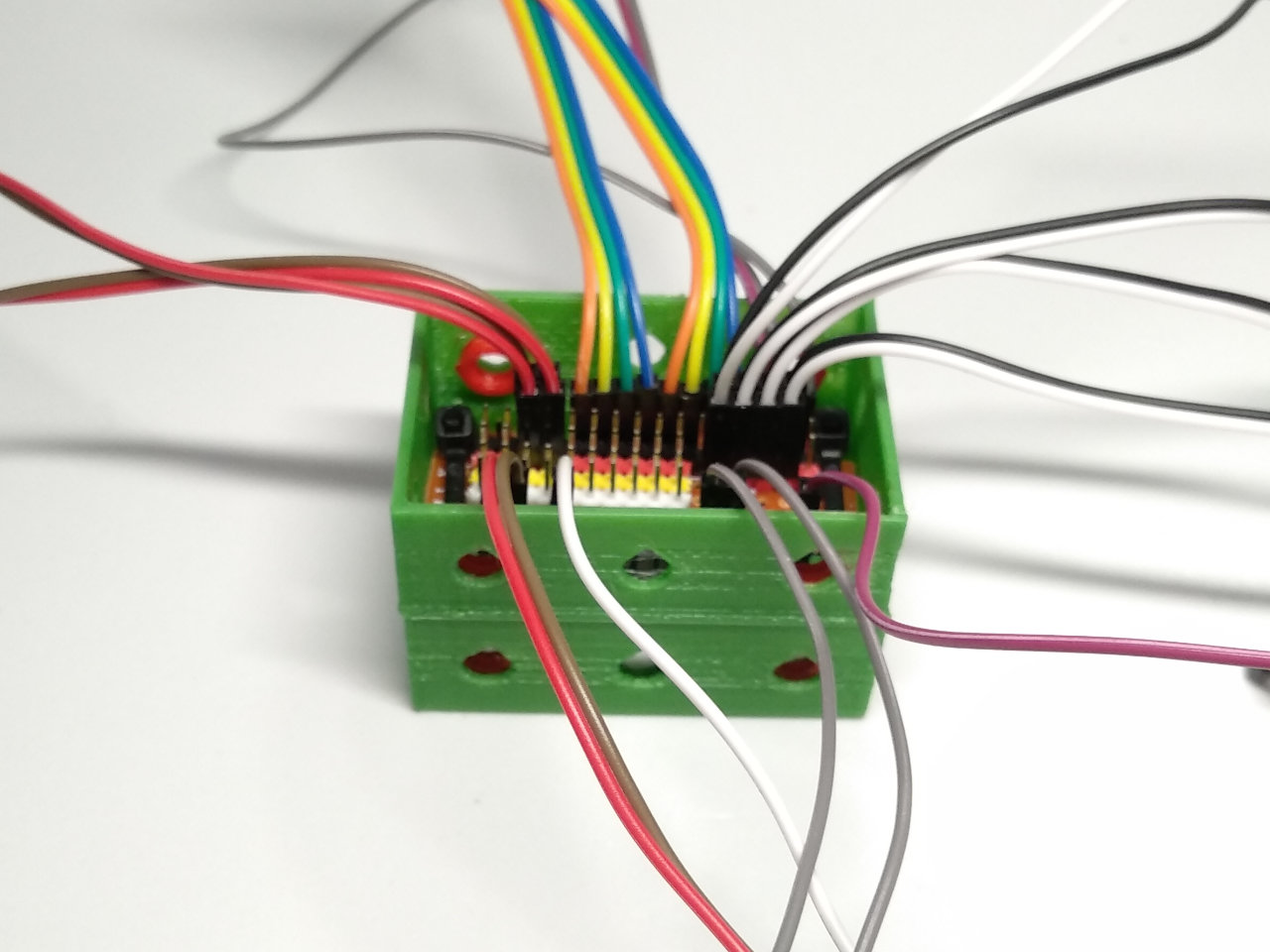
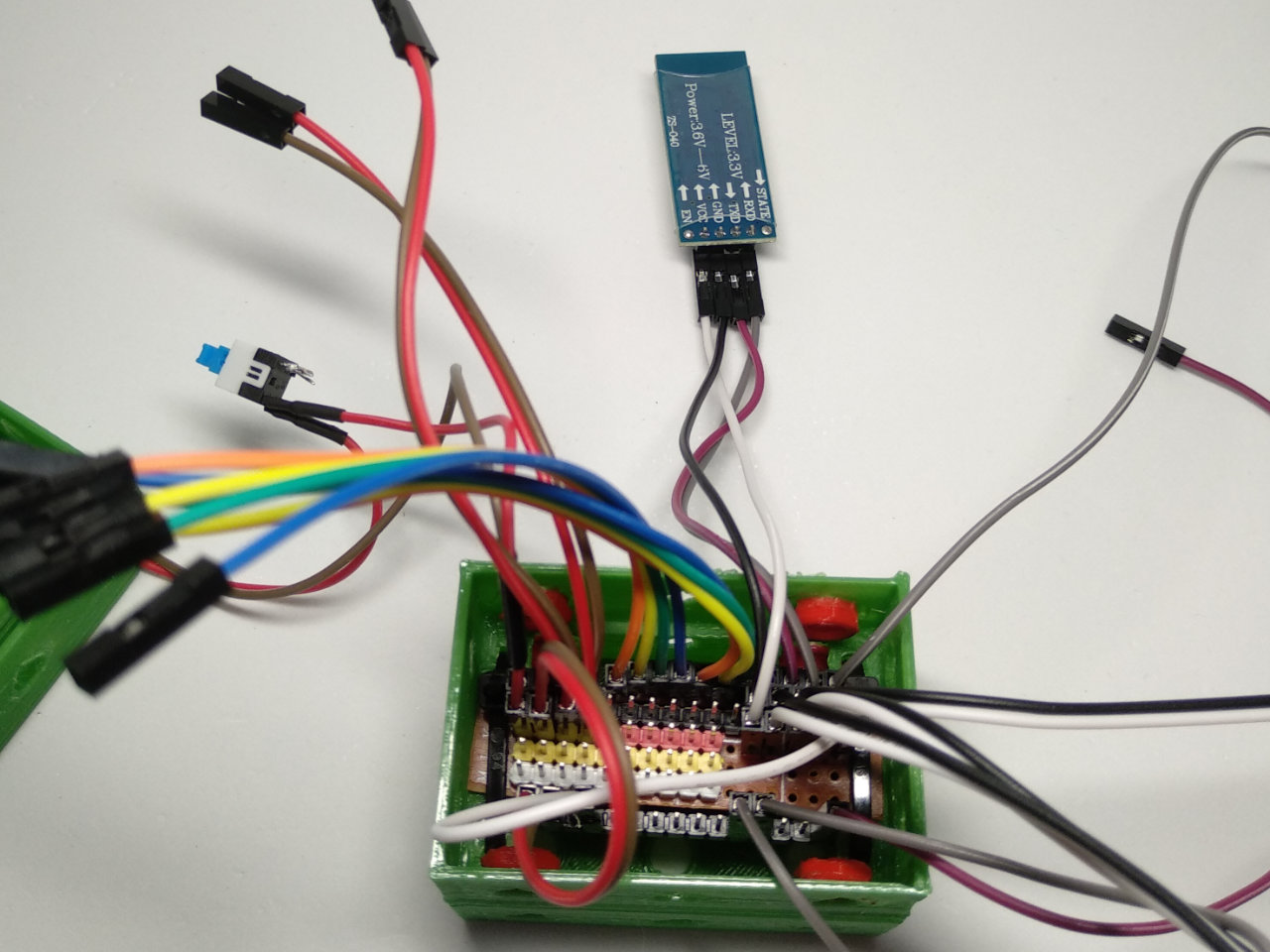
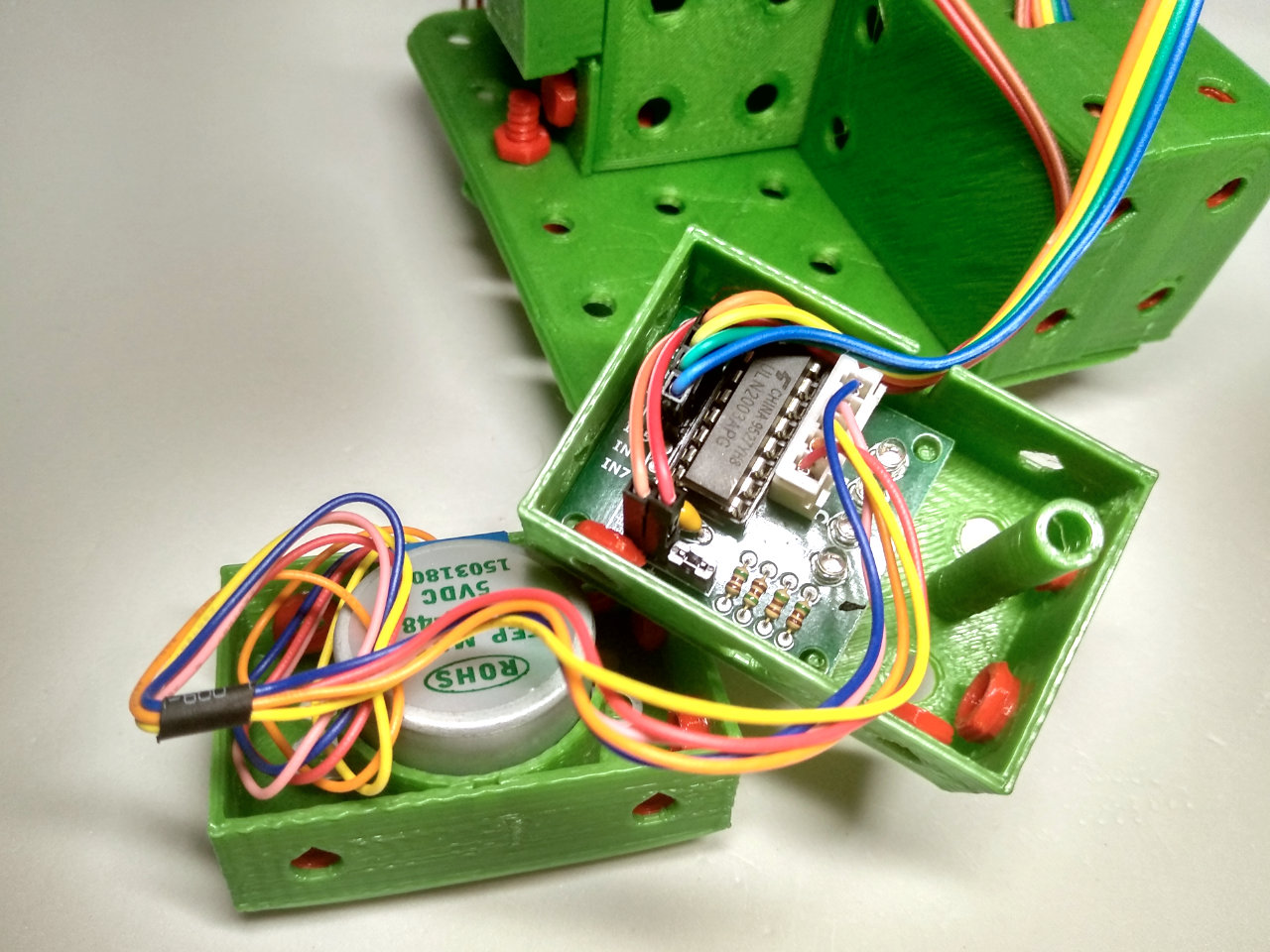
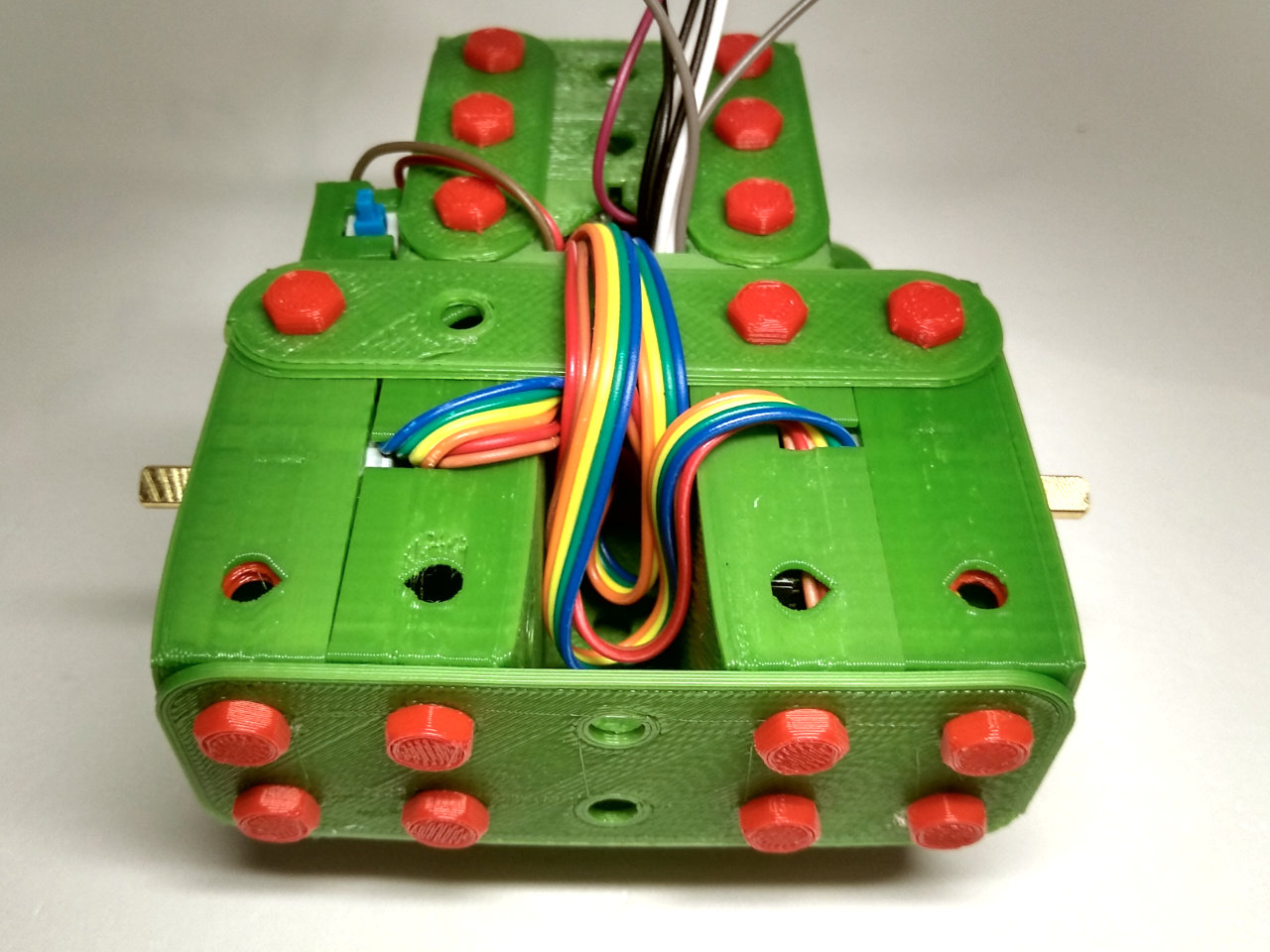
En la siguiente imagen puedes ver cómo quedaría, aunque el número de cables que ya se están utilizando dificulta ver las conexiones con claridad, por lo que el esquema anterior puede ser más claro.
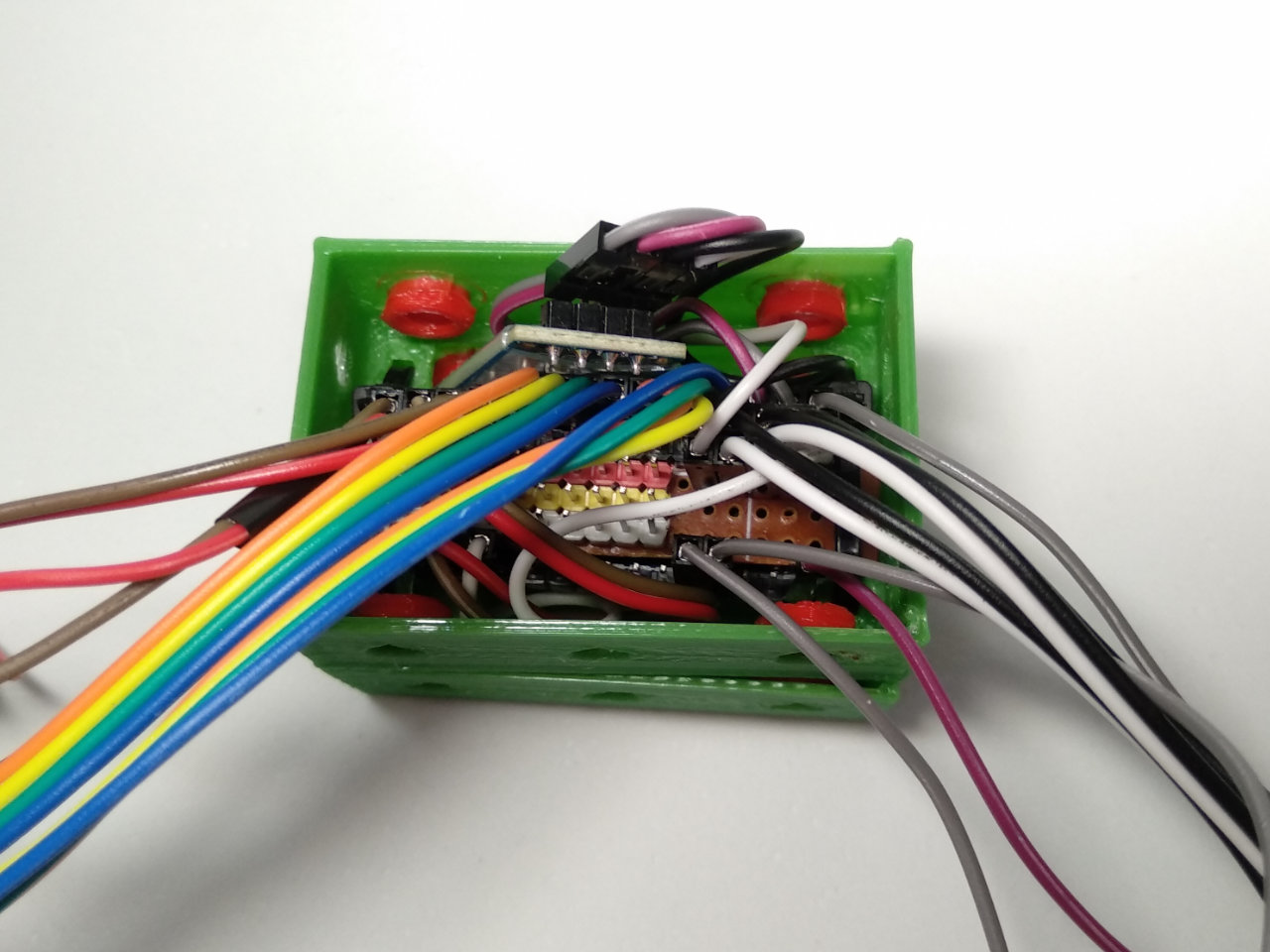
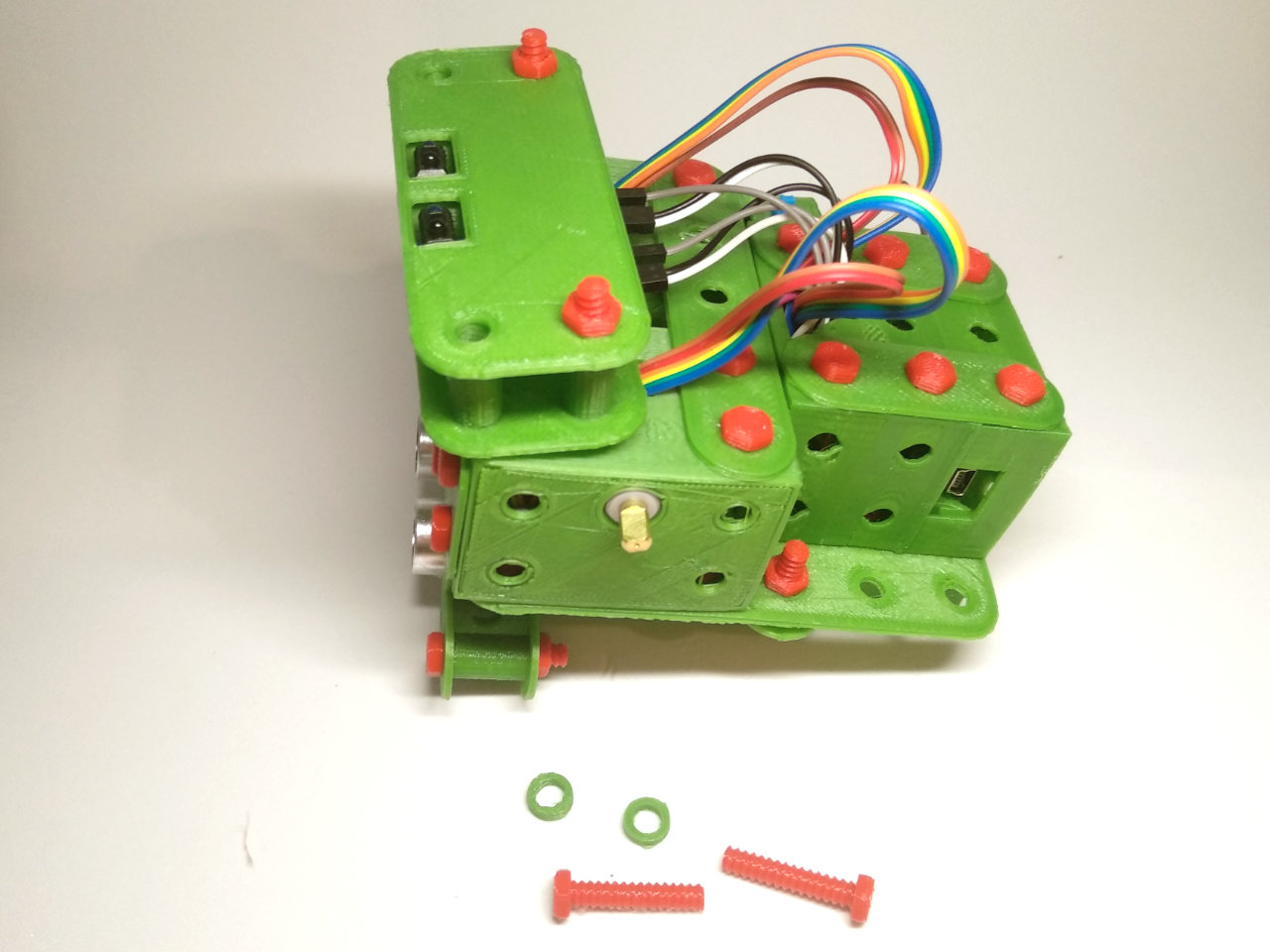
Para que todos los cables y componentes que forman este bloque central del robot queden recogidos en el pequeño espacio disponible, deberás dejarlo todo lo más recogido posible. Así que introduce el módulo bluetooth en el lateral de todo este conjunto como se muestra en la siguiente foto. También deberías dejar recogidos en el otro lateral los 3 cables que unen la placa de conexiones con la placa Arduino (los que van a los pines VIN, GND y 5V).
Cierre del módulo central
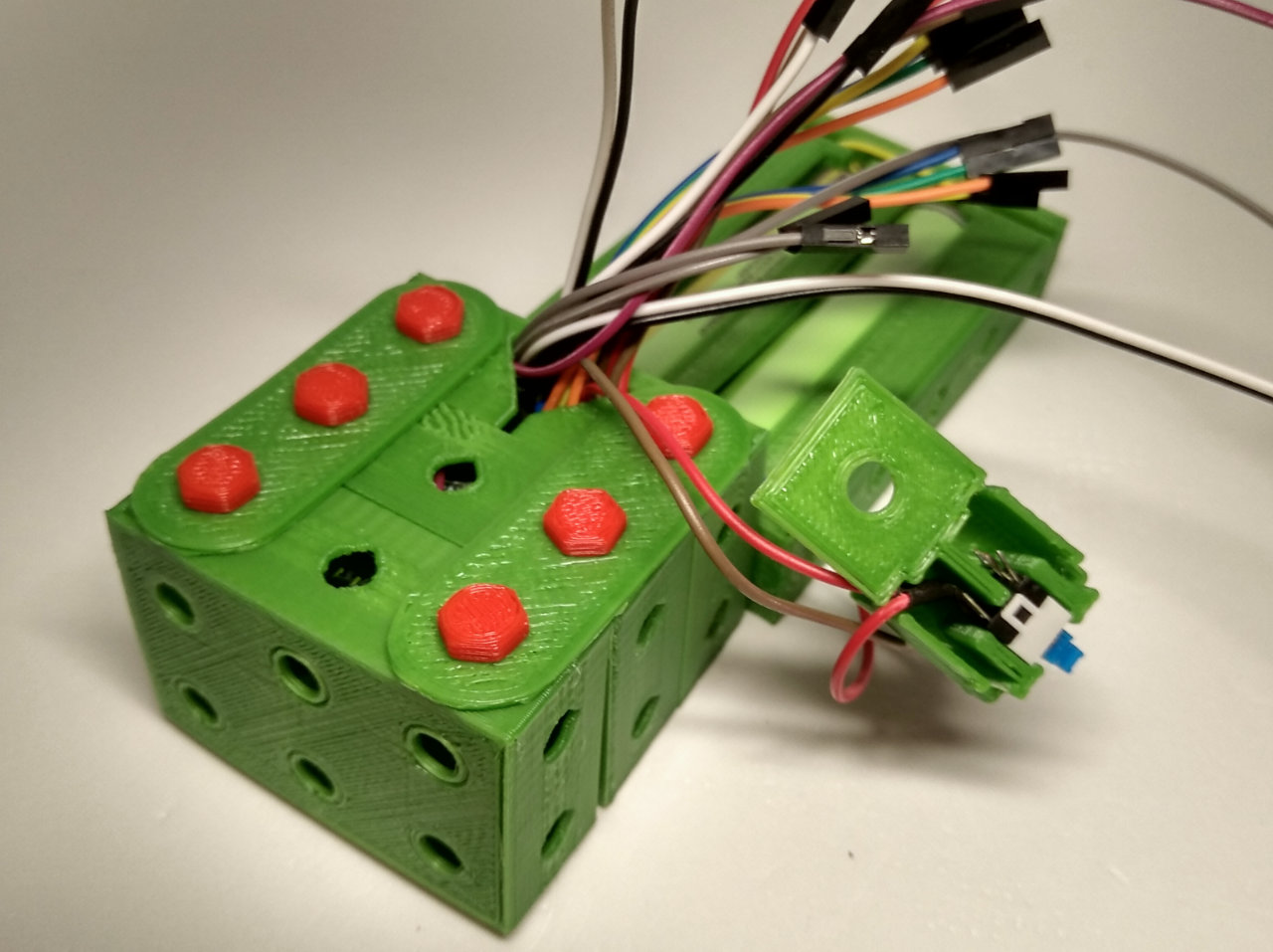
Para que todo este módulo central, que contiene la placa Arduino, la placa de conexiones, el módulo Bluetooth y todo su cableado, quede bien asegurado, se debe cerrar con la pieza superior del soporte de la placa Arduino impresa en 3D. En la siguiente foto puedes ver de qué pieza se trata, y las tuercas que deben pegar en ella.


Introduce por la ranura lateral de esta pieza cada uno de los cables que han quedado libres, que servirán para conectarlos con los motores, otros sensores del robot y los de alimentación que están conectados a las baterías. Prepara 2 tiras de 3 orificios y 6 tornillos de 8 mm que se utilizarán para dejar unidas las 3 partes del bloque.
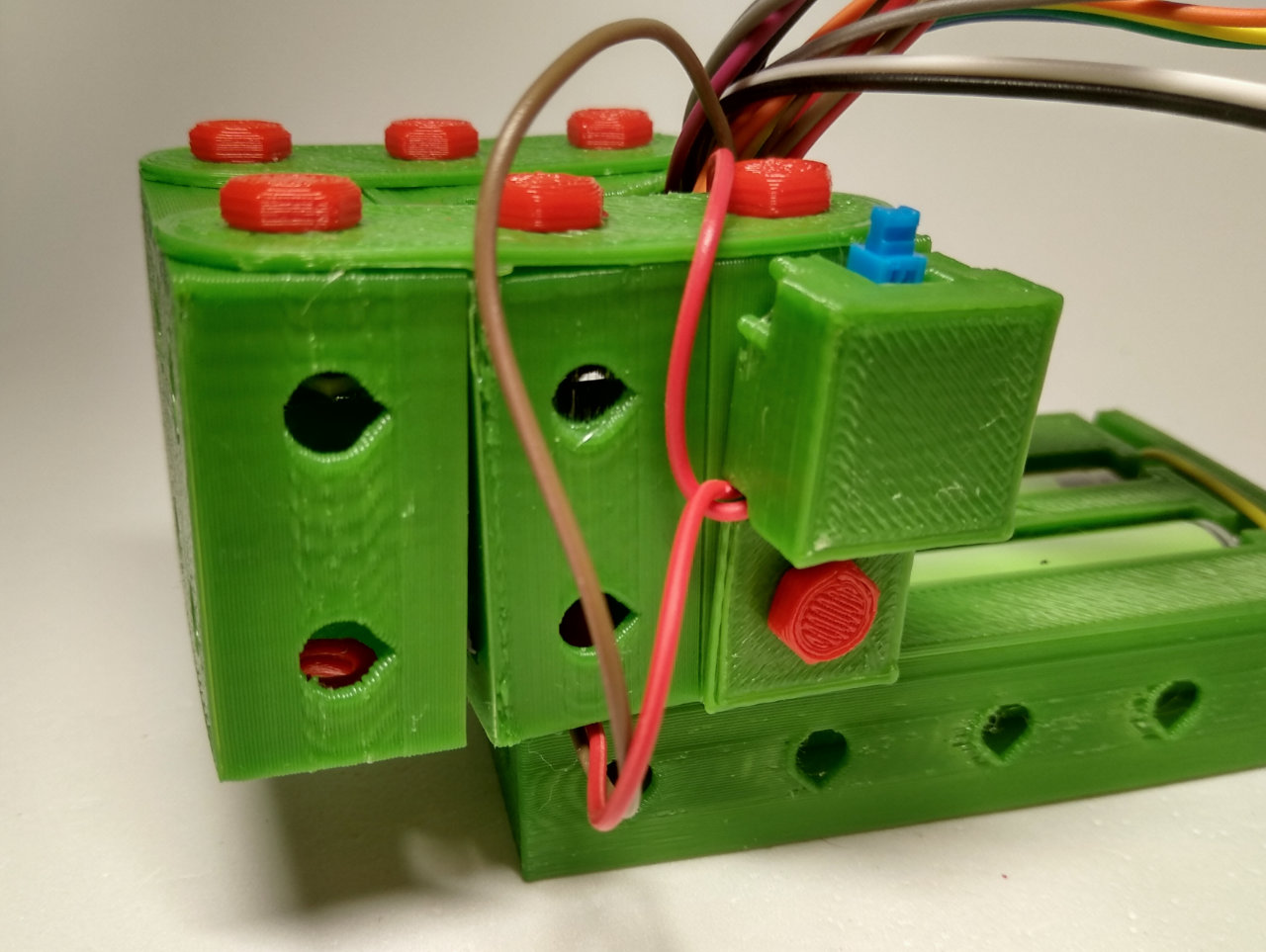
Atornilla las tiras del modo que se muestra en la imagen para dejar el bloque unido. Prepara el soporte de interruptor introduciendo el mecanismo en él como también puedes ver en la foto. Asegúrate de dejar los cables del interruptor como se muestra, sacándolos por el lateral del soporte del interruptor.
Atornilla el soporte del interruptor utilizando un tornillo de 8 mm en el orificio que puedes localizar con la ayuda de la siguiente foto. En el interior de ese hueco debe encontrase una tuerca que previamente se había pegado.
Para fijar el módulo central a la base del robot, utiliza otros 6 tornillos de 8 mm y la propia base del robot.
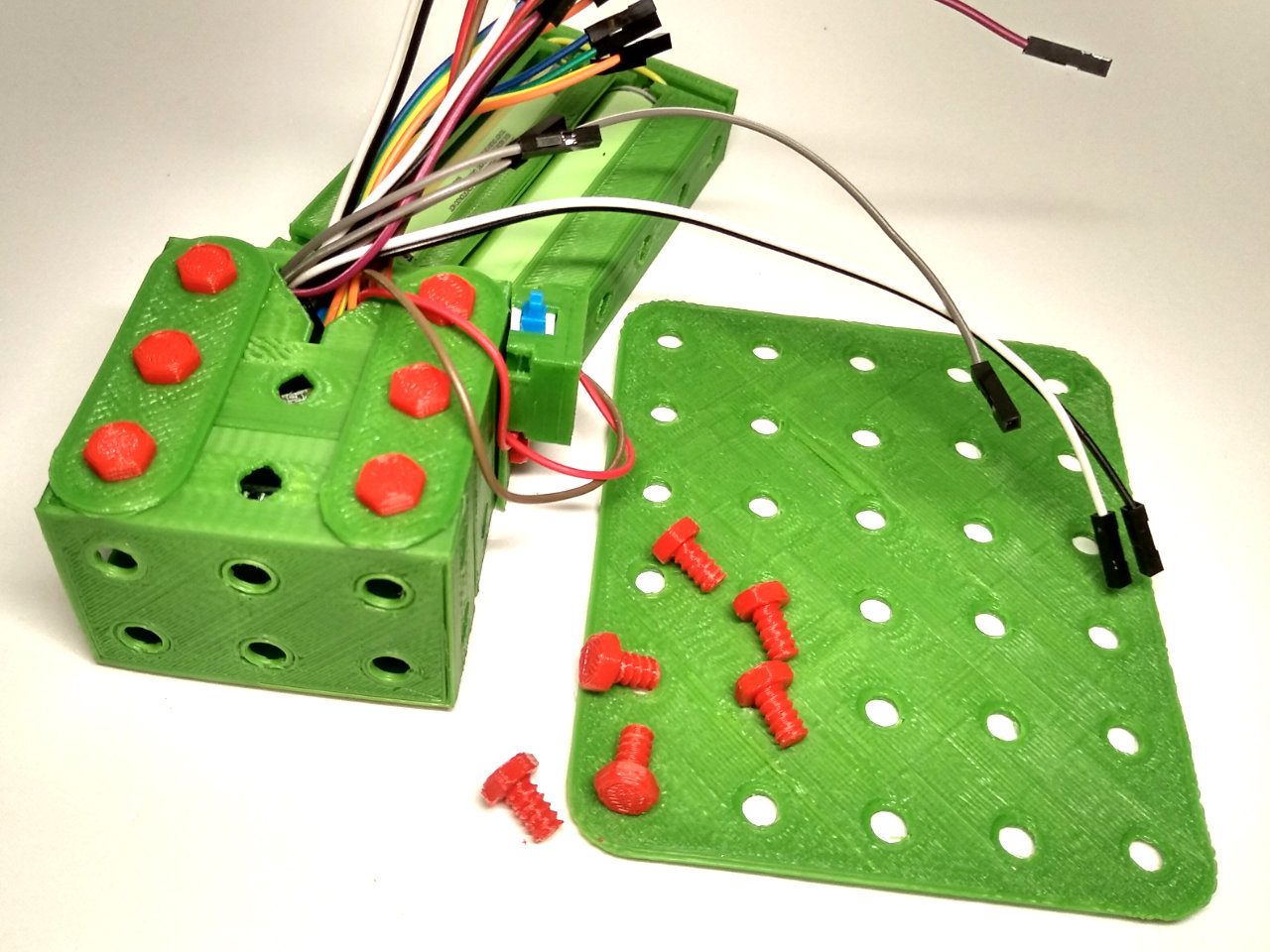
Deberás colocar los tornillos en los orificios de la base del robot que puedes localizar con esta foto, dejando el módulo central bien fijado al otro lado.
Fijación de las baterías a la base
Prepara 6 tuercas, 2 tornillos de 8 mm, otros 2 tornillos de 16 mm y 2 escuadras de 1x1 orificios para poder unir el soporte de las baterías con la base del robot.
Pega 2 tuercas en el interior del soporte de las baterías, en el orificio central del lado más largo del soporte, como se muestra en la imagen.
Atornilla las escuadras al soporte aprovechando las tuercas que has pegado antes. En el otro lado de las escuadras deja atornillados los tornillos de 16 mm.
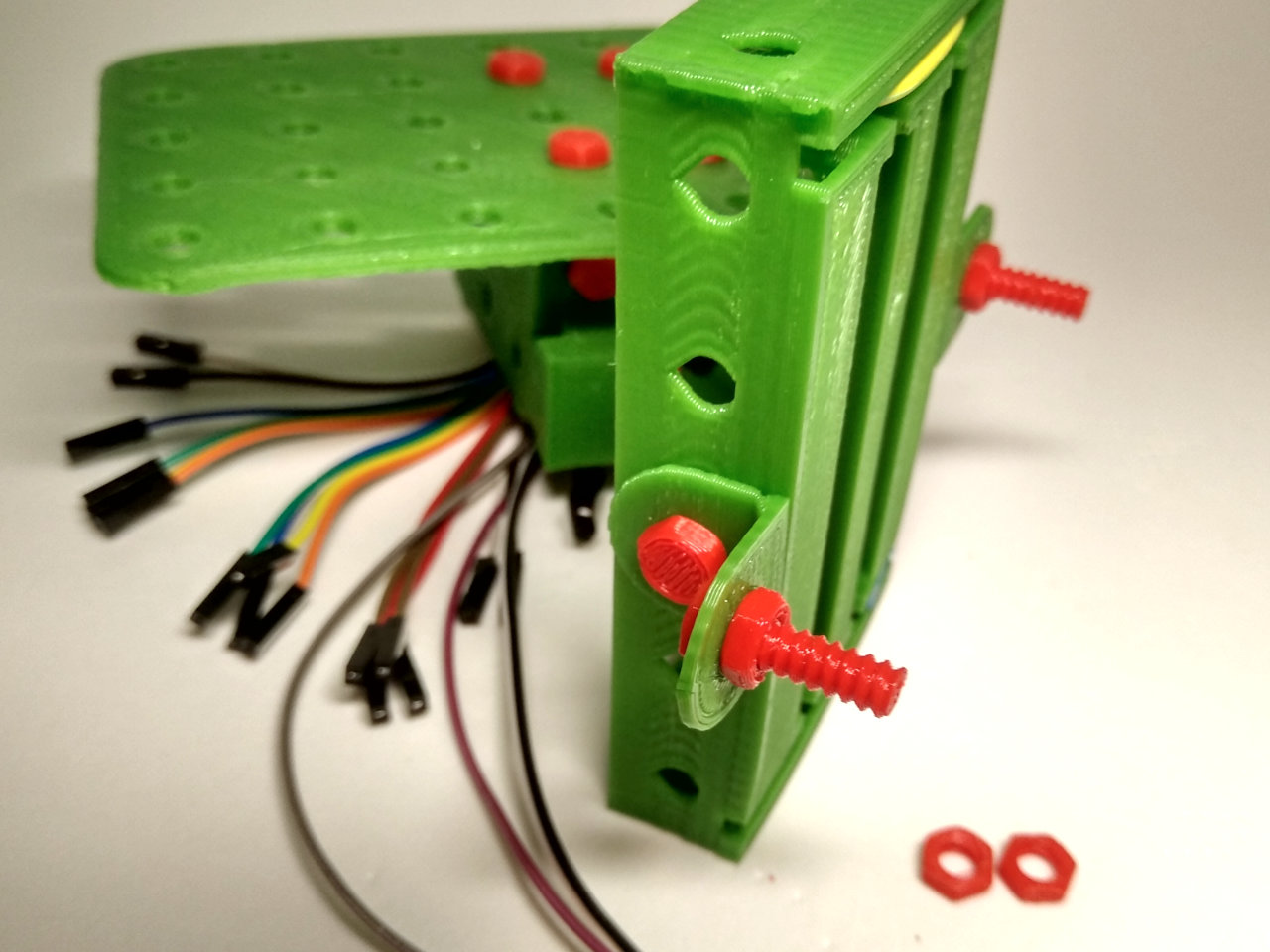
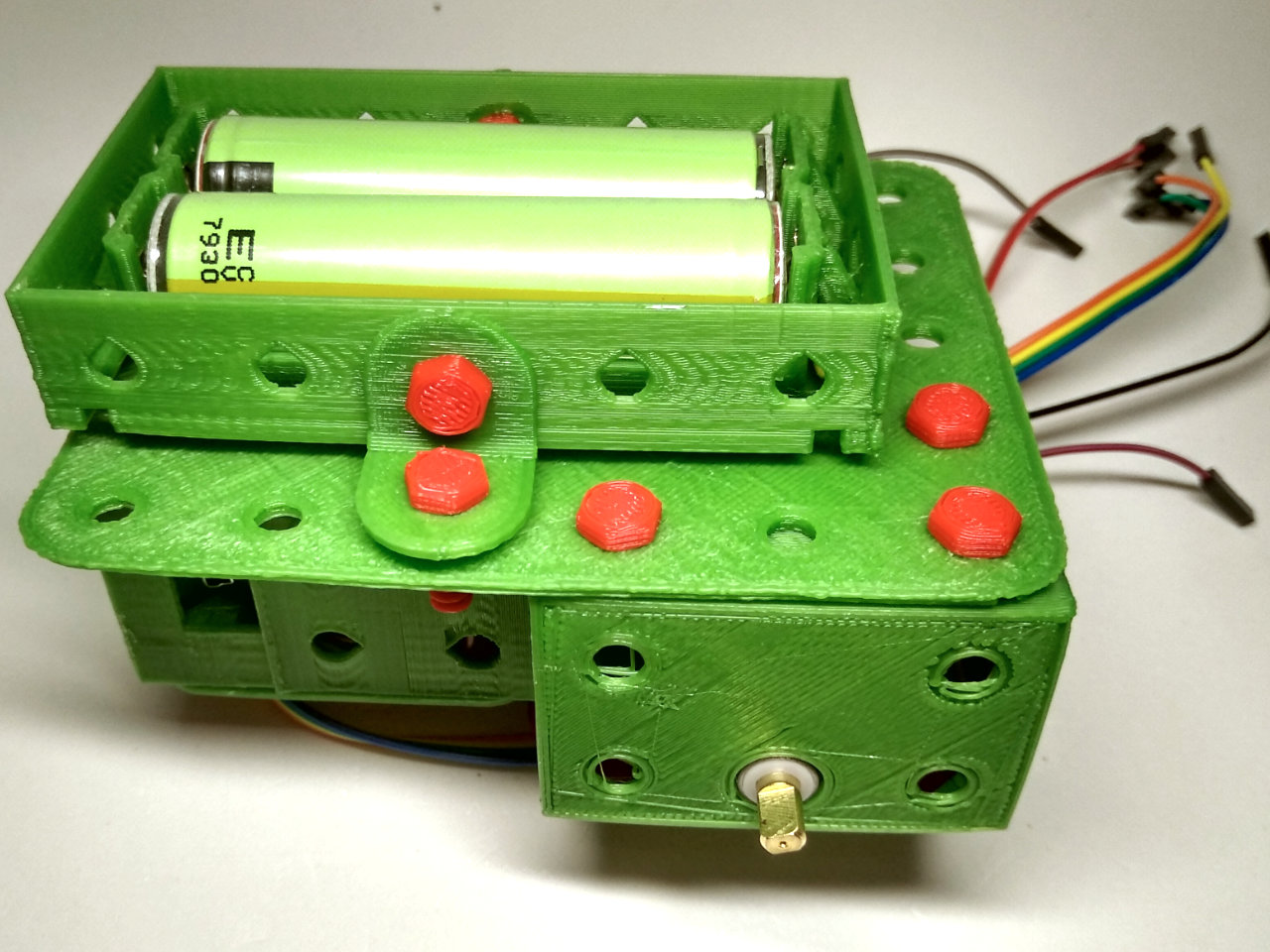
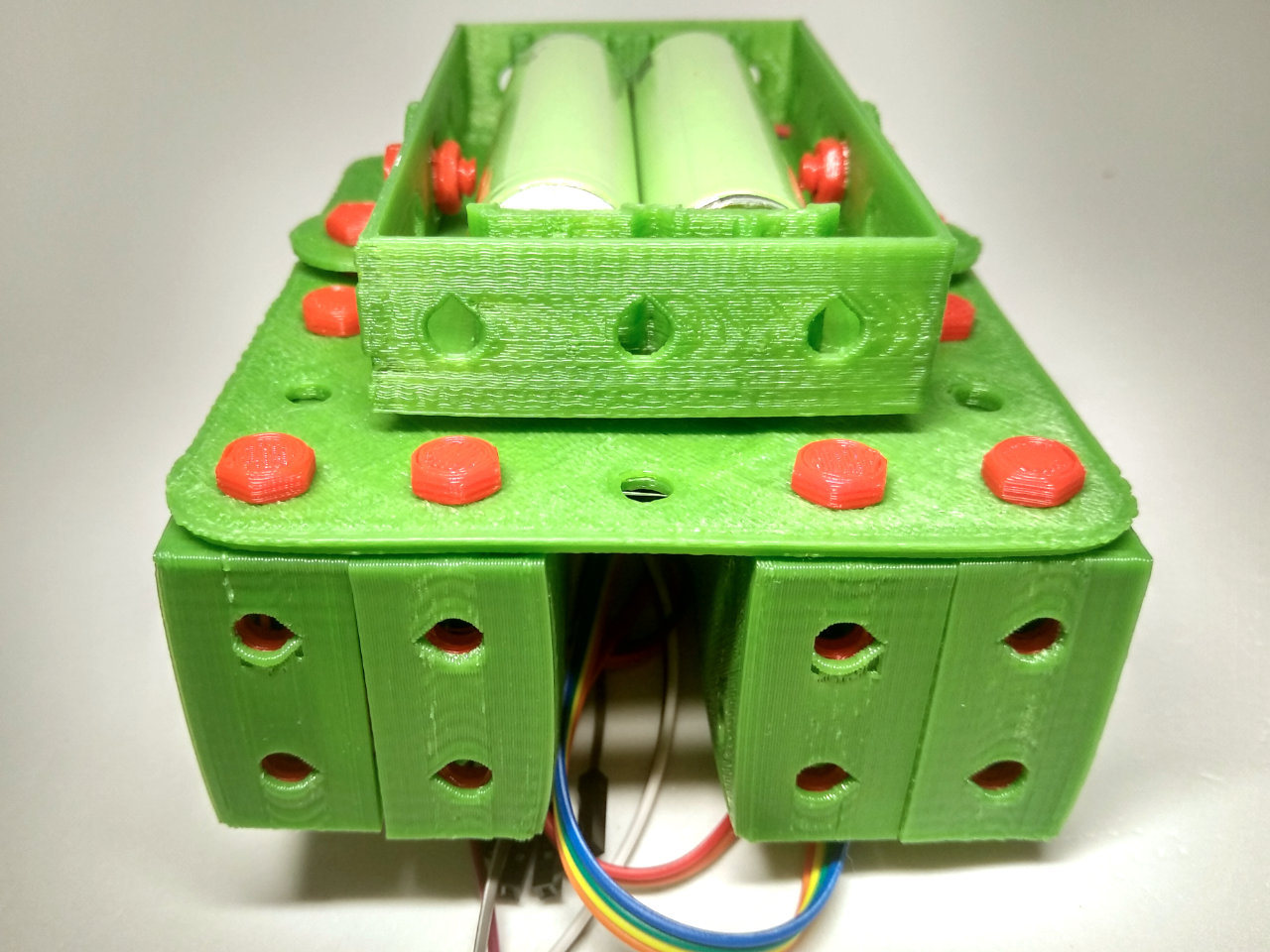
Pasa esos tornillos más largos por 2 orificios de la base del robot de manera que el soporte de las baterías quede en línea en la parte trasera con el módulo central. Usa las tuercas para dejarlo fijado, aunque no te preocupes de dejarlo bien atornillado del todo porque después vas a tener que mover momentáneamente el soporte de las baterías para fijar el sensor de distancia.
Motor derecho
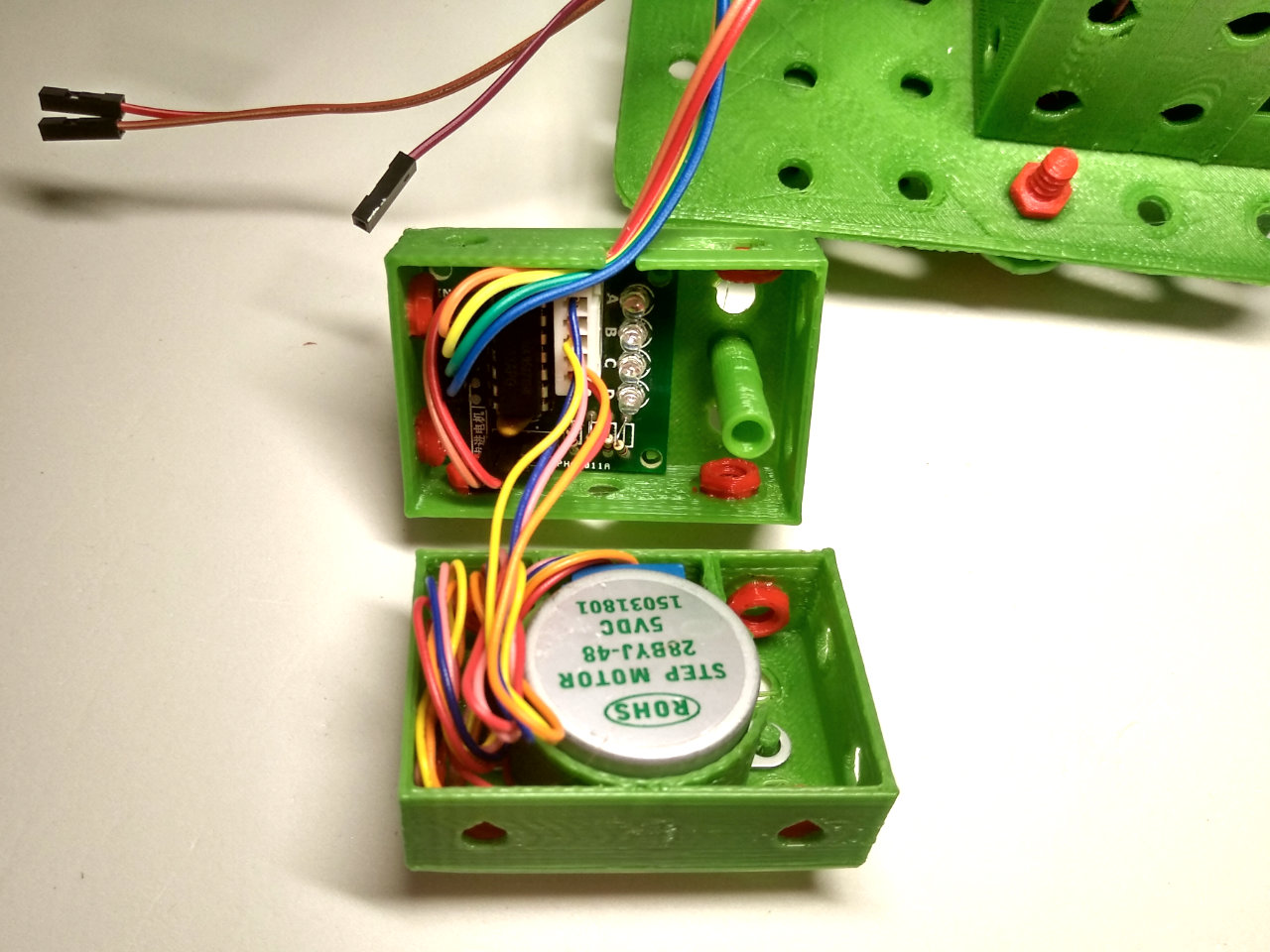
Localiza uno de los motores 28byj, su driver ULN2003 y las dos partes del soporte de este tipo de motores.
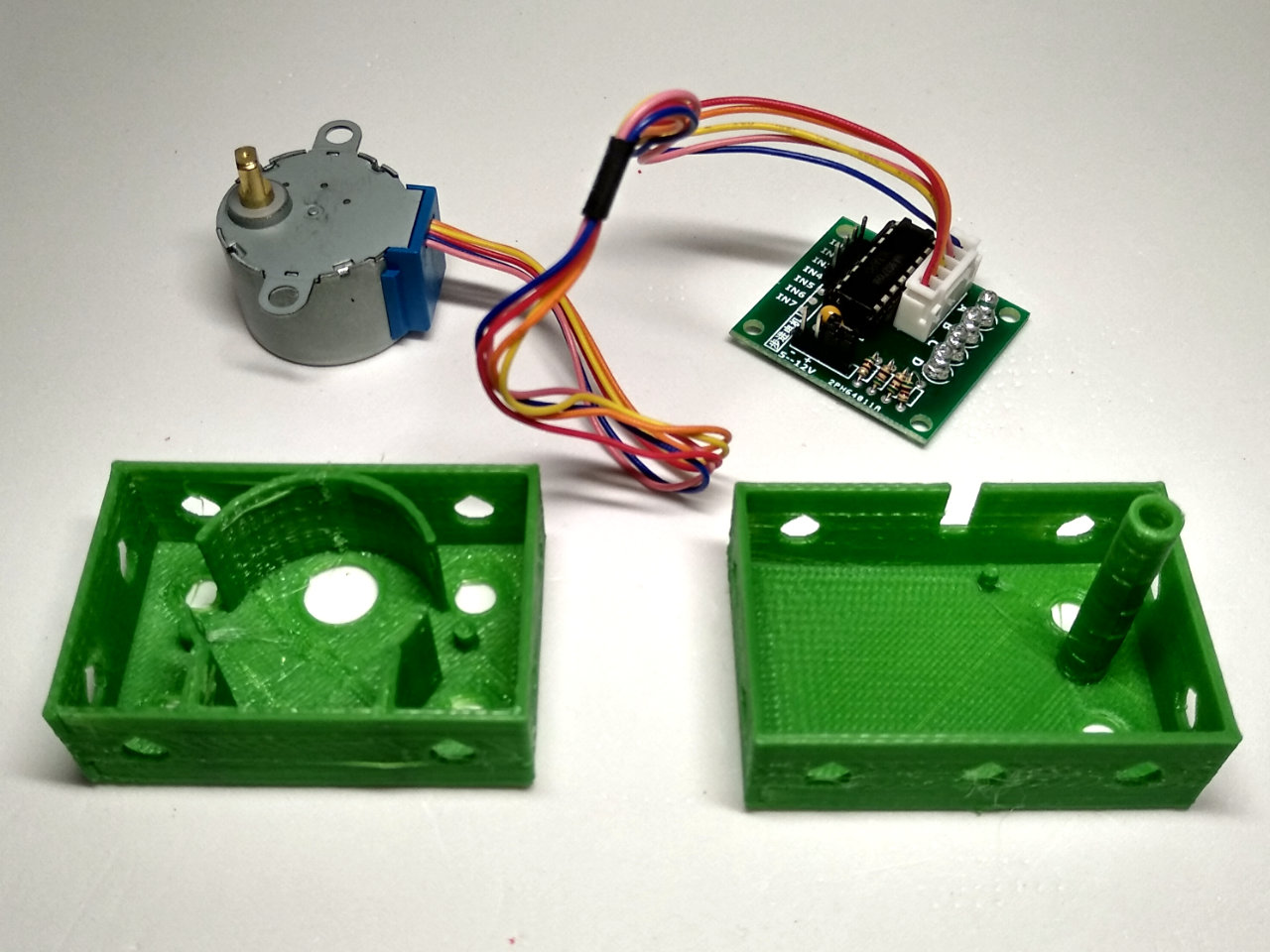
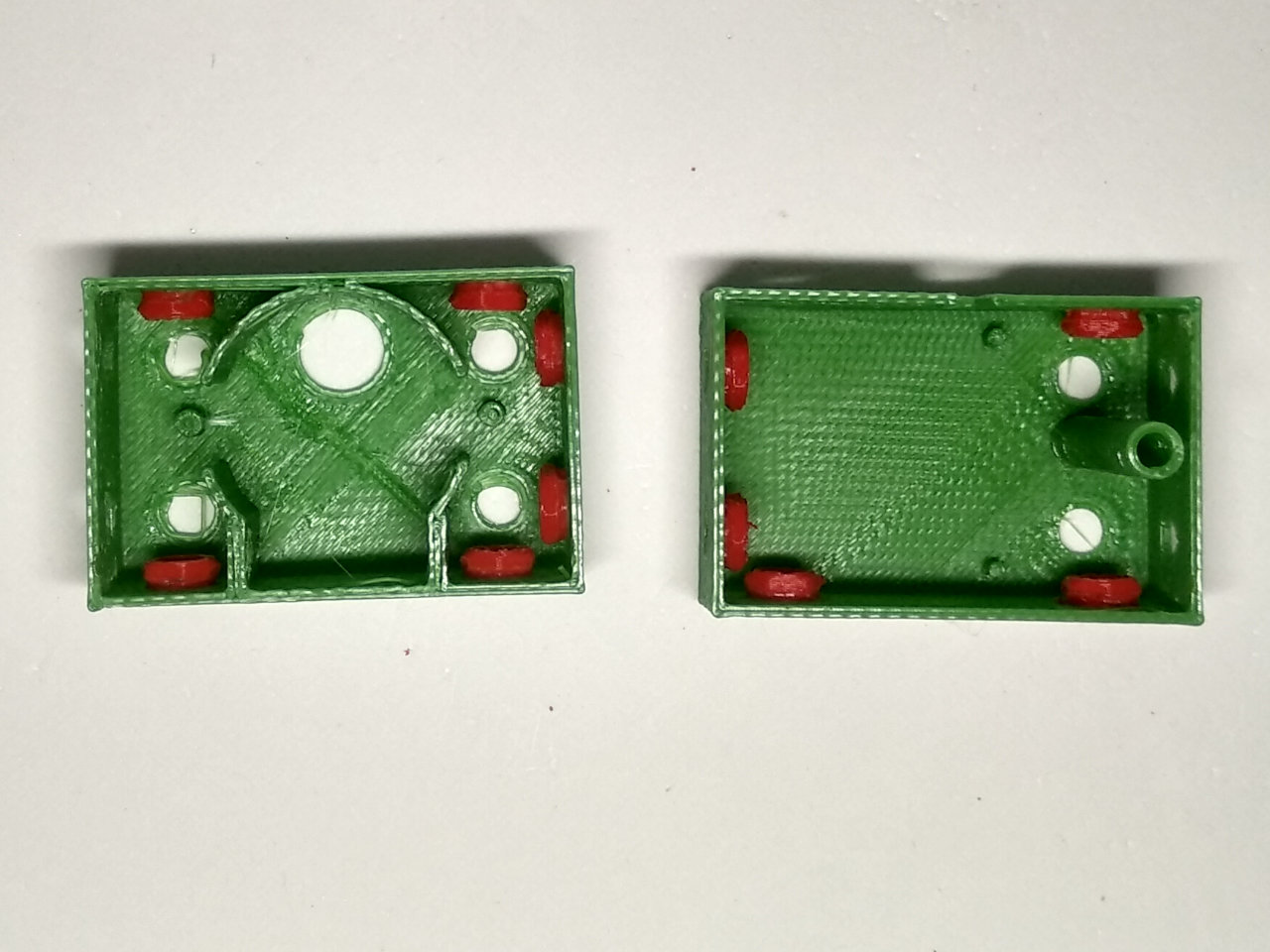
Pega 11 tuercas en el interior del soporte del motor como se muestra en la siguiente imagen:
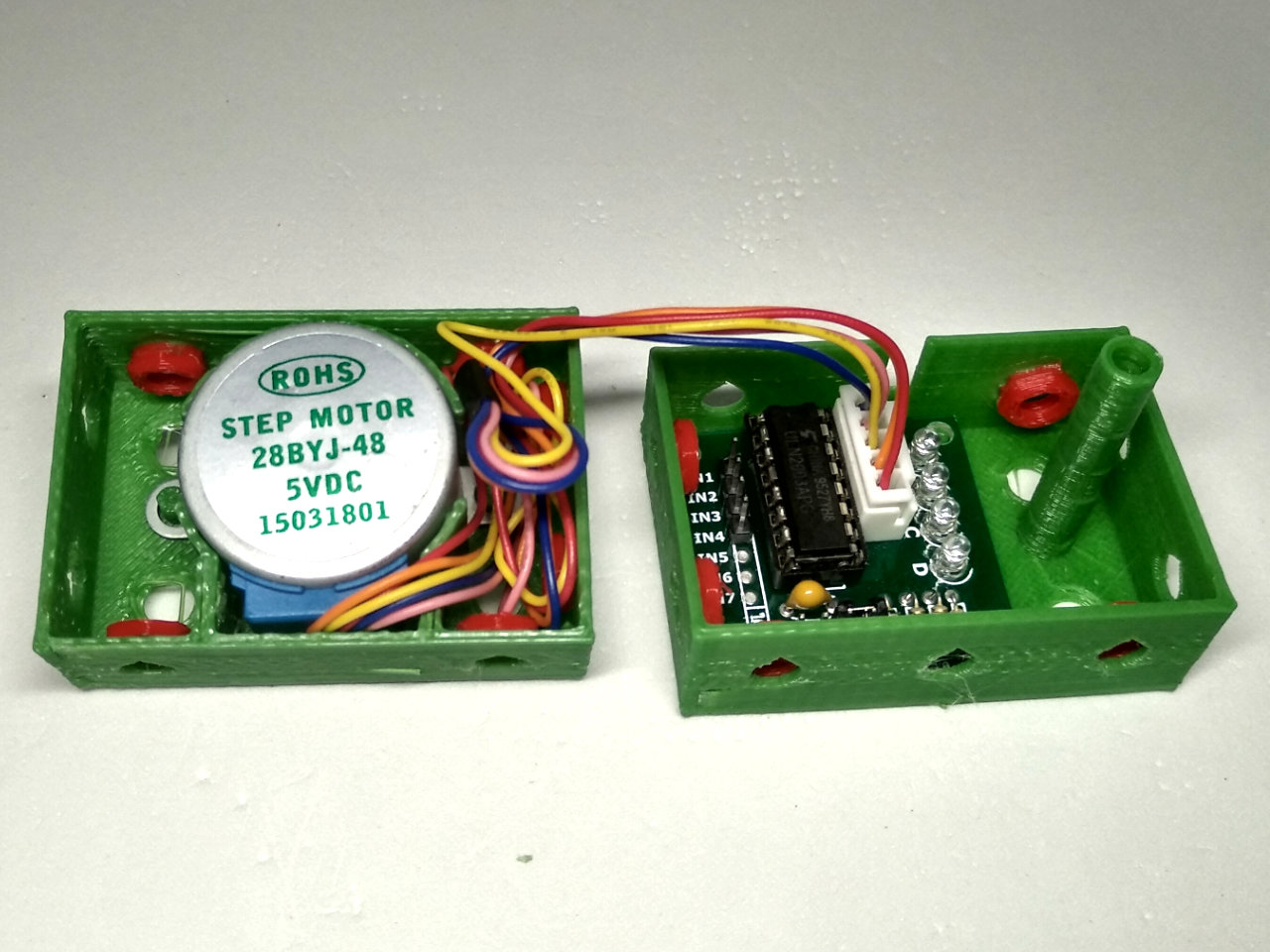
Coloca en el interior del soporte el motor y el driver tal como se muestra. Deberás dejar los cables bien recogidos para que quepa todo en el conjunto, por lo que recoge los cables del motor en el lado derecho del soporte como se muestra en la imagen.
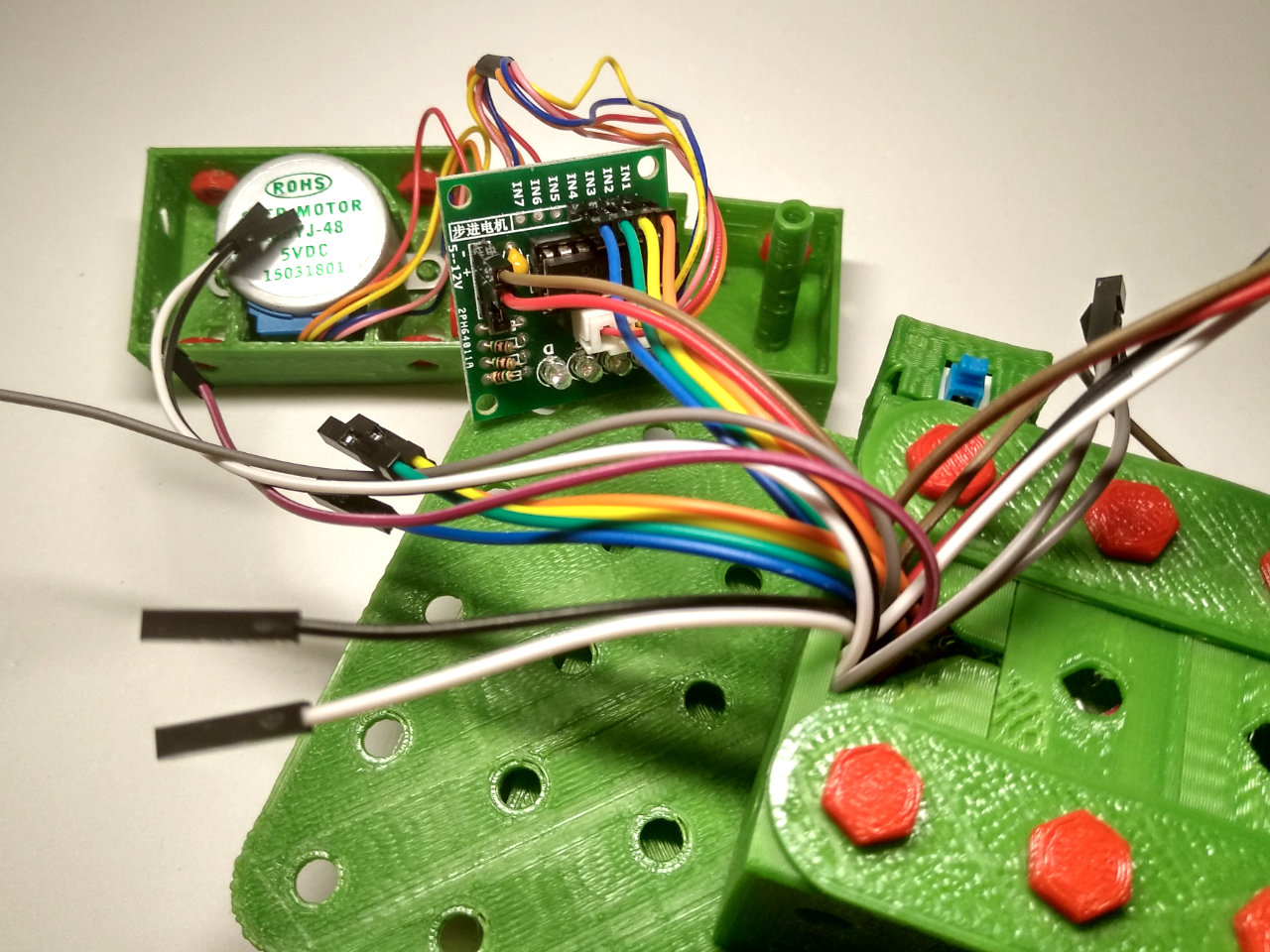
Engancha los 4 cables que iban a los pines D2 a D5 de la placa Arduino (si los marcaste de alguna manera al inicio te será fácil distinguirlos), asociados al control del motor derecho del robot. Si no sabes cuál de los 2 conjuntos de 4 cables son los correspondientes al motor derecho, podrás ejecutar en la placa Arduino algún código de prueba que realice el movimiento del motor (recuerda que para que se muevan los motores debes encender el interruptor que activa el circuito).
Esos 4 cables deben conectarse de manera que queden emparejados de la siguiente manera con los pines de la placa Arduino:
- IN1 driver > D2 Arduino (cable naranja)
- IN2 driver > D3 Arduino (cable amarillo)
- IN3 driver > D4 Arduino (cable verde)
- IN4 driver > D5 Arduino (cable azul)
Conecta también al driver los cables rojo y marrón que venían del lado izquierdo de la placa de conexiones. El cable rojo debe conectarse al pin + del driver, y el cable marrón al pin - del driver.
Visto de manera esquemática, estas deben ser las conexiones a realizar:
Deja recogidos los cables que has conectado al driver, de manera que pasen por el lateral del conector blanco y se pasen por la ranura del soporte.
Une las dos partes del soporte.
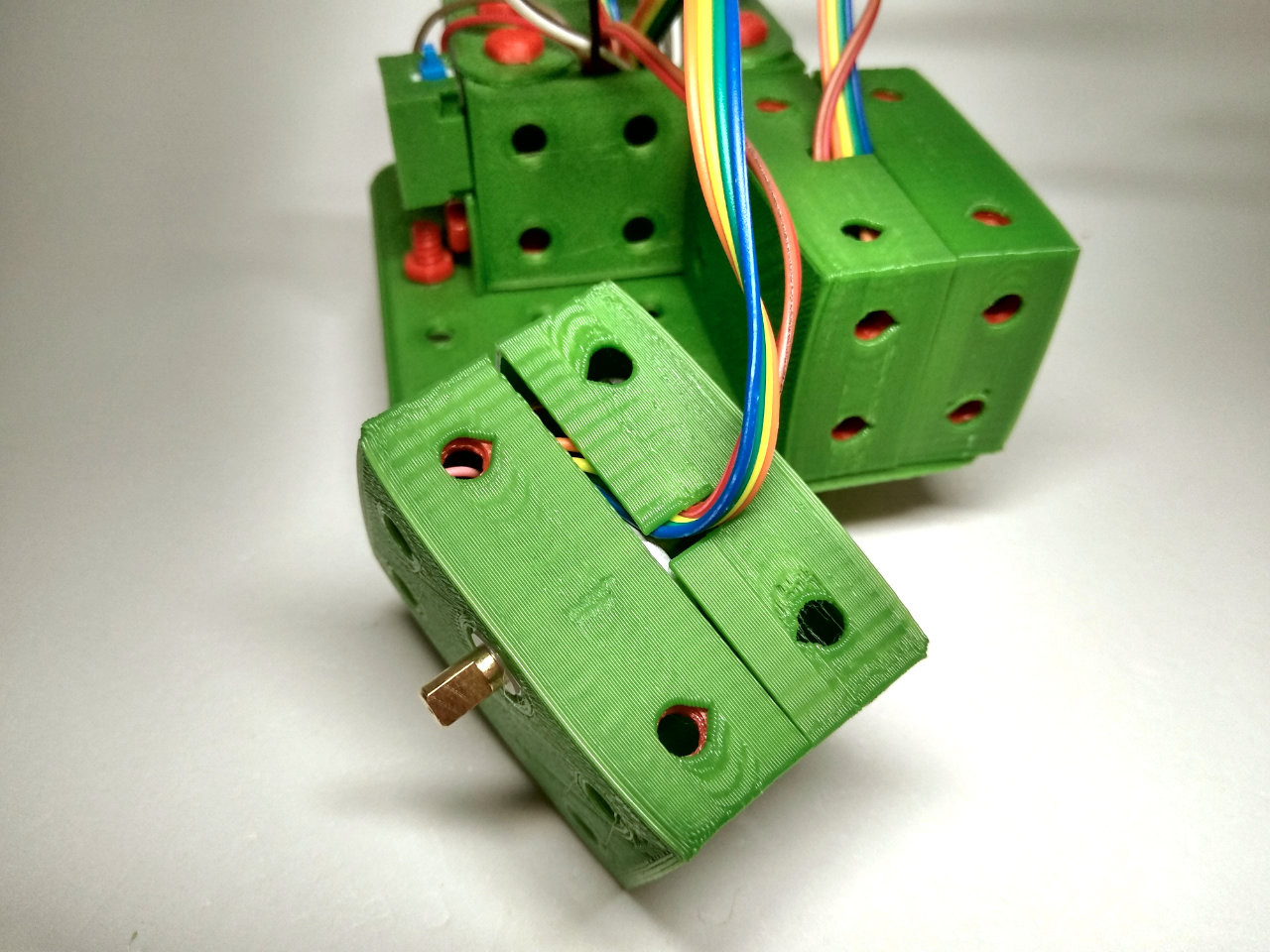
Fija con 3 tornillos de 8 mm el conjunto del motor derecho a la base del robot en el lugar que se muestra en la siguiente imagen:
Motor izquierdo
Necesitarás de nuevo otro soporte de motor 28byj y en el caso del motor izquierdo debes pegar 10 tuercas.
Coloca el motor, el driver y conecta los cables de manera similar al motor derecho. En este caso los cables deberán estar asociados así:
- IN1 driver > D6 Arduino (cable naranja)
- IN2 driver > D7 Arduino (cable amarillo)
- IN3 driver > D8 Arduino (cable verde)
- IN4 driver > D9 Arduino (cable azul)
Recuerda conectar también los cables de alimentación (rojo y marrón) al driver.
Cierra el conjunto dejando los cables por la ranura y prepara para unirlo a la base del robot dejando la salida de los cables hacia afuera.
Usa 3 tornillos de 8 mm para fijar el motor izquierdo a la base del robot para que quede como se muestra.
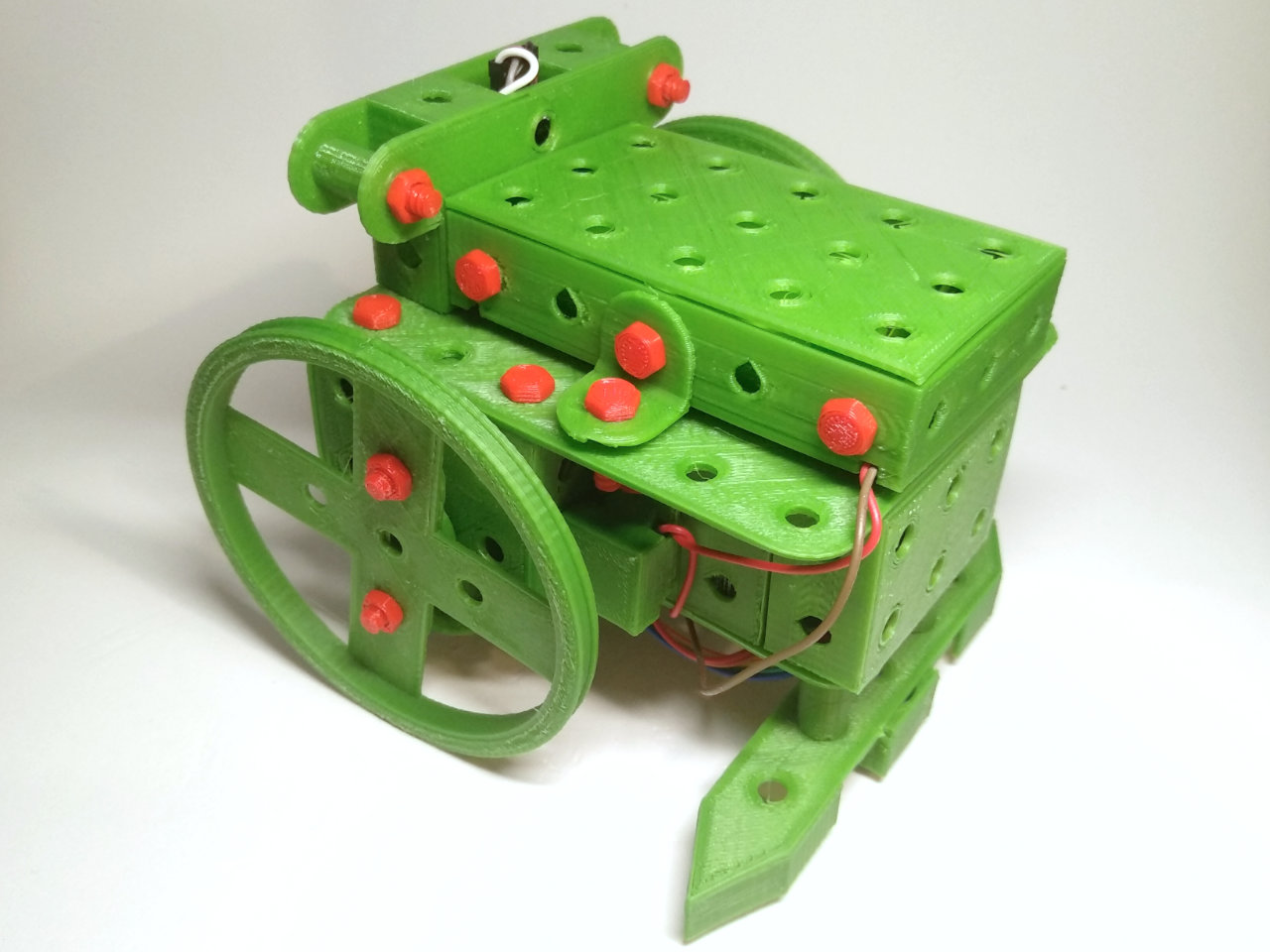
Para que todo el conjunto de los motores quede más firme, utiliza una tira de 5 orificios y una placa de 5x2 orificios y únelos a los motores con 11 tornillos de 8 mm. Observa en la imagen cómo debería quedar:
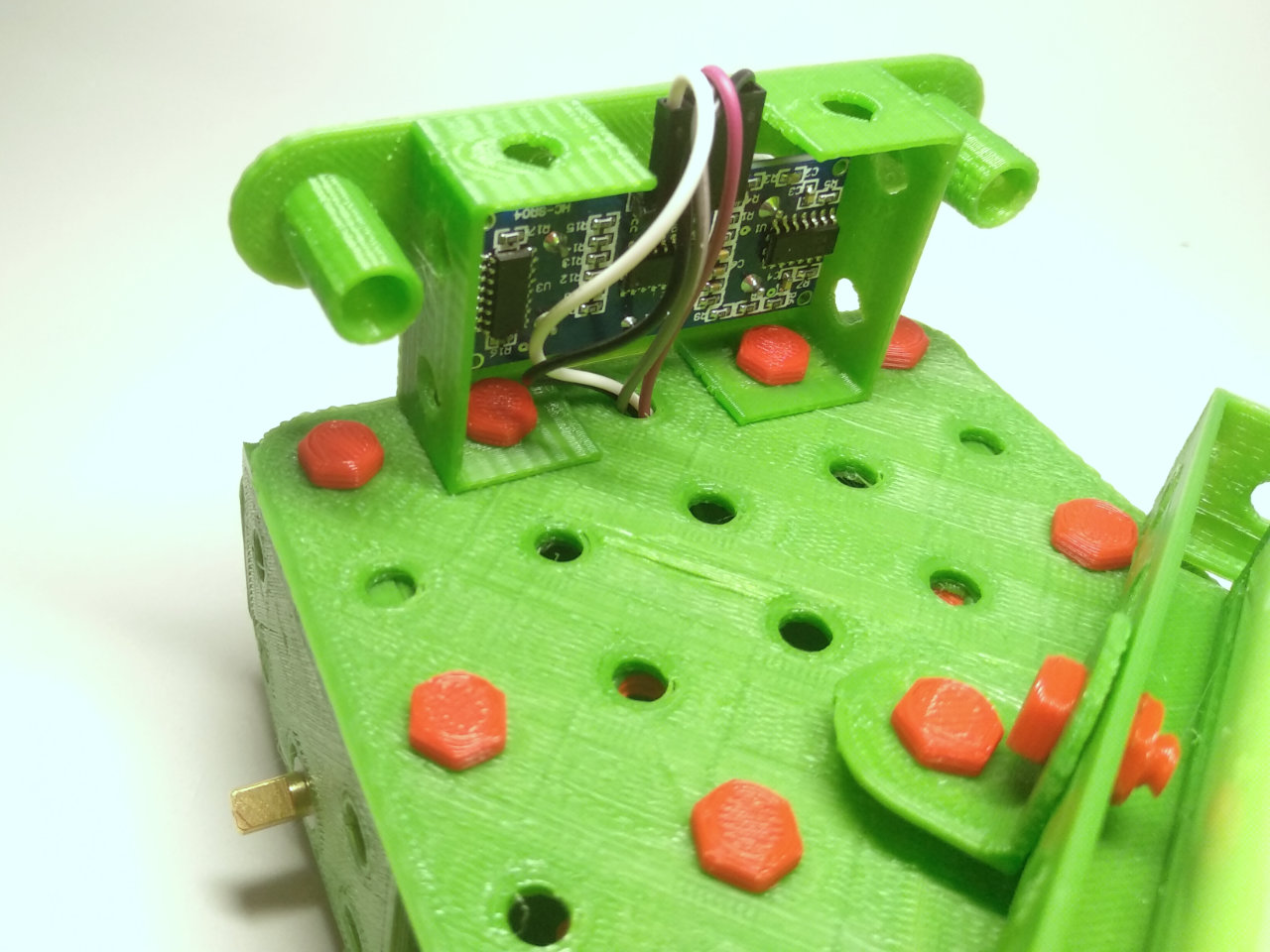
Sensor de distancia
Prepara el sensor de distancia por ultrasonidos HC-SR04 junto con su soporte impreso en 3D, 2 tornillos de 25 mm y 2 tuercas.
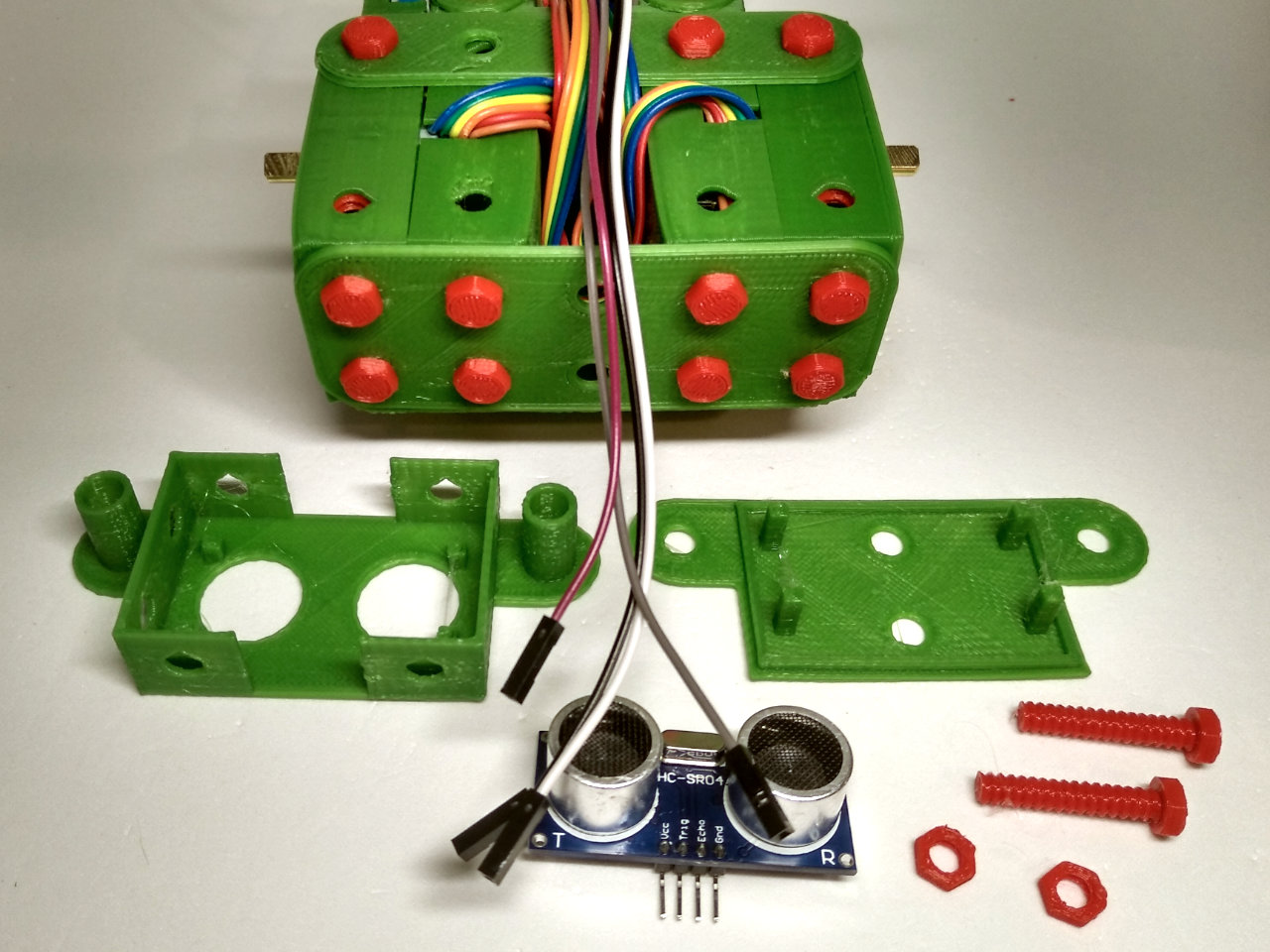
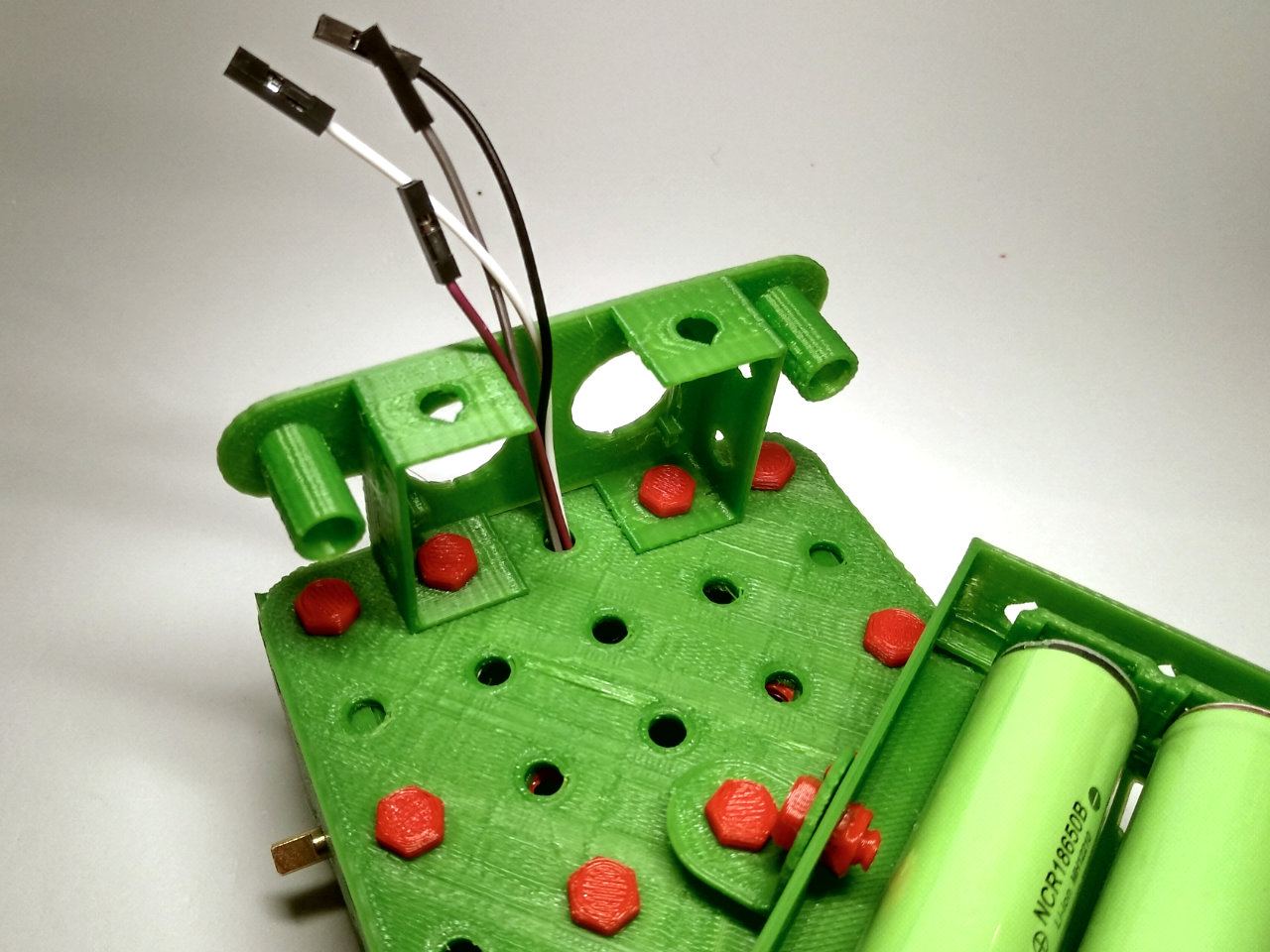
A ese sensor se deben conectar 4 cables que corresponde a los cables blanco y negro largos (20 cm) que estén conectados al lado derecho (5V) de la placa de conexiones, y los cables gris y púrpura, también largos, que estaban conectados a los pines D12 y D13 de la placa Arduino.
Para que estos cables lleguen hasta el sensor de distancia, deberás pasarlos por el orificio central de la parte delantera de la base del robot. Si no llegan bien los cables pues probar a pasarlos por debajo de la tira de 5 orificios que unía los dos motores.
Fija la pieza delantera del soporte del sensor de distancia a la base del robot con los 2 tornillos que ya estaban en su posición. Para ello tendrás que apartar el soporte de las baterías momentáneamente.
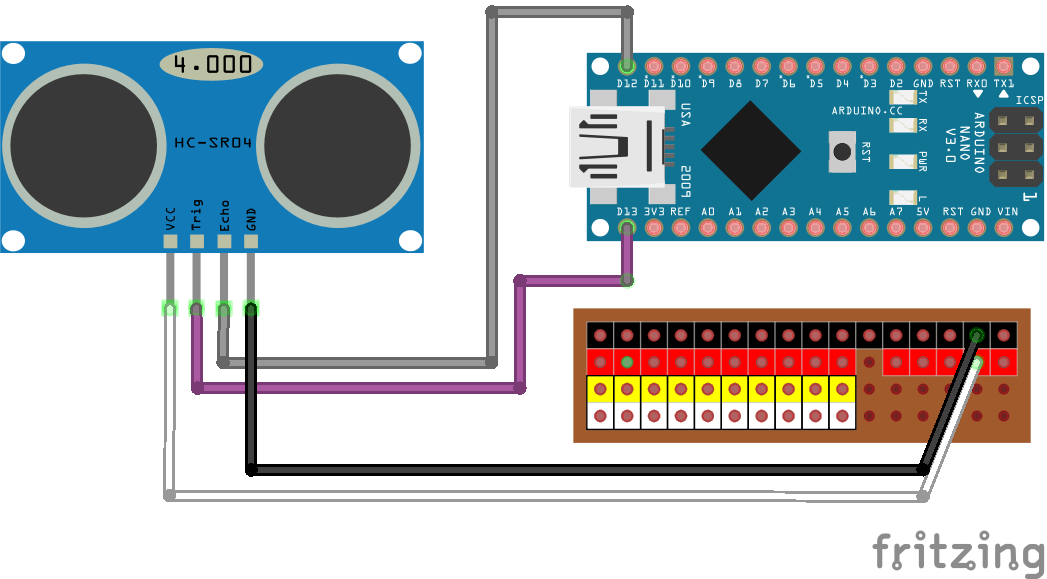
Conecta los cables a los pines del sensor HC-SR04 de la siguiente manera:
- VCC: Cable blanco que está conectado a uno de los pines rojos del lado derecho de la placa de conexiones, que debe tener 5 voltios.
- TRIG: Cable púrpura que está conectado al pin D13 de la placa Arduino.
- ECHO: Cable gris que está conectado al pin D12 de la placa Arduino.
- GND: Cable negro que está conectado a uno de los pines de la fila negra (GND) de la placa de conexiones.
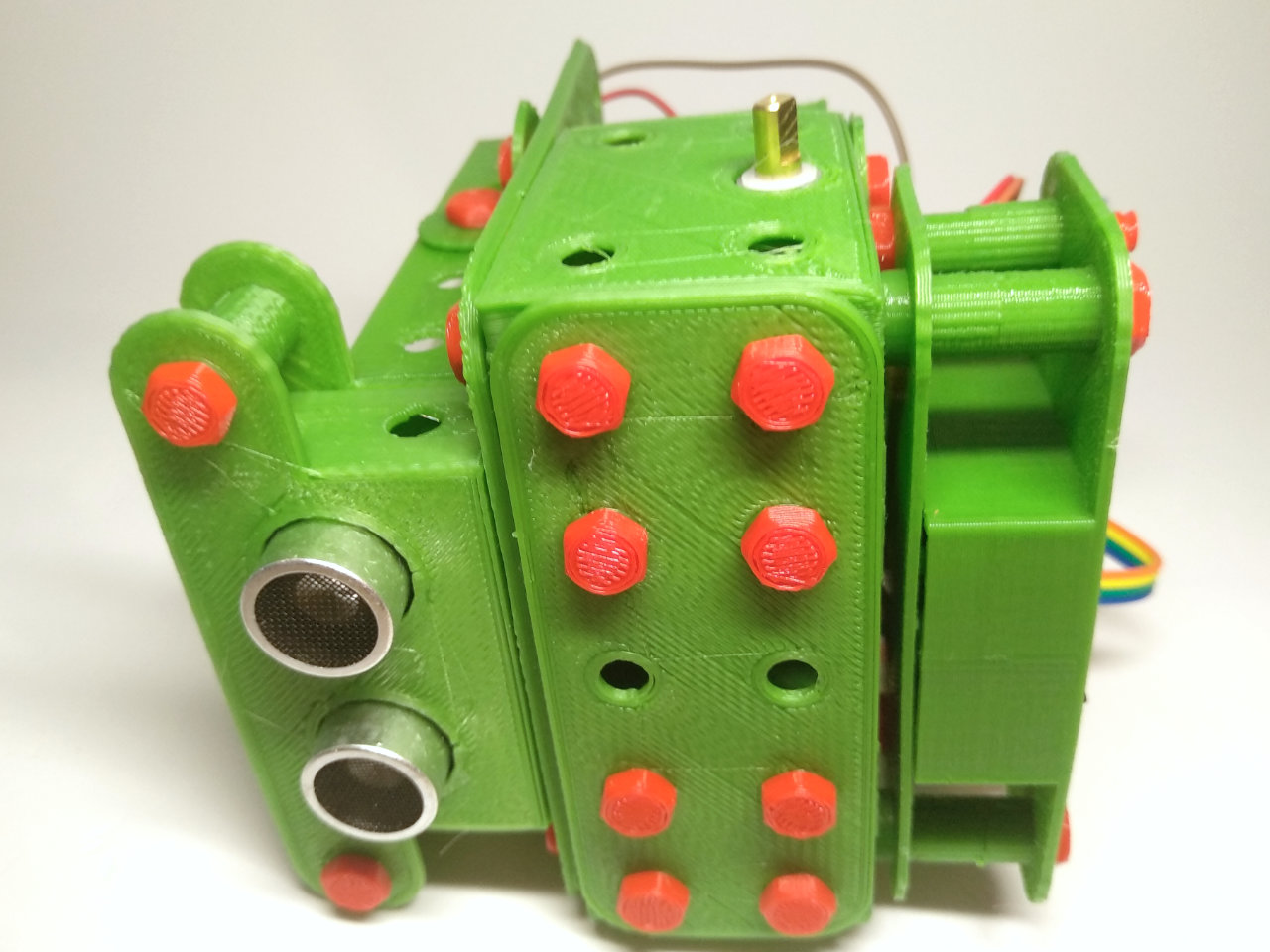
Coloca el sensor dentro del soporte para que quede de manera similar al mostrado en esta foto:
Fija la parte trasera del soporte del sensor de distancia HC-SR04 usando los dos tornillos largos.
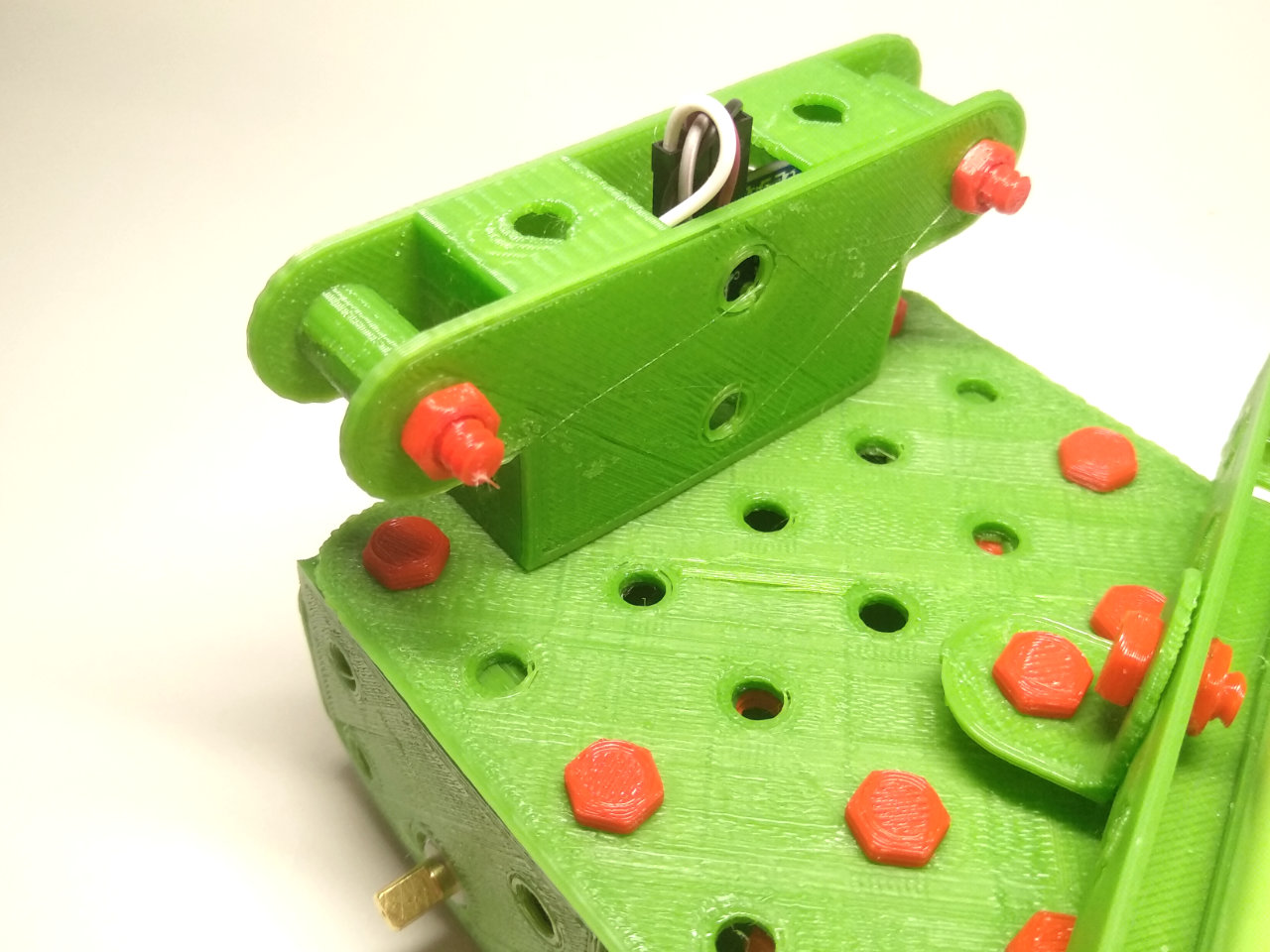
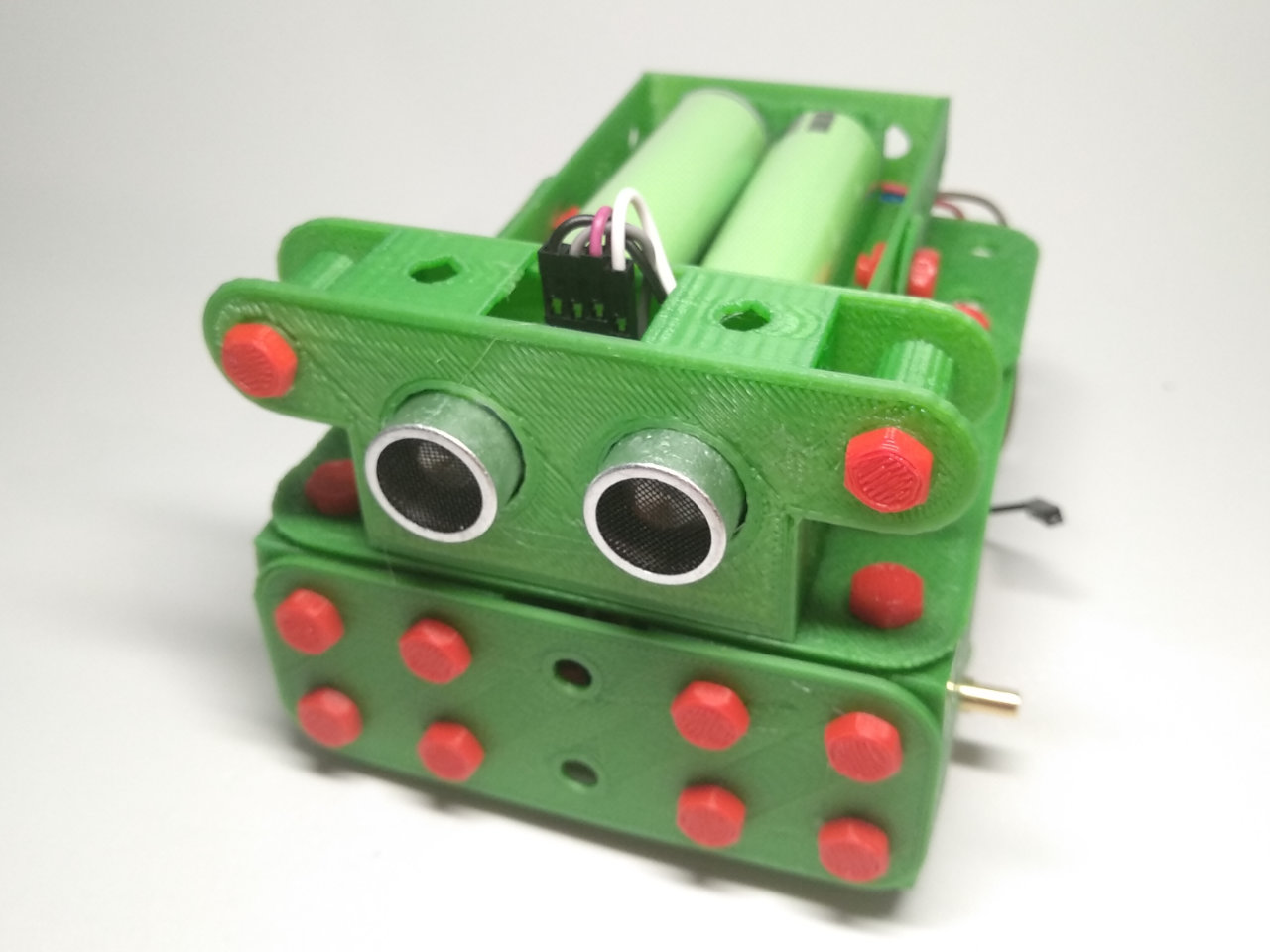
Vuelve a dejar bien fijado el soporte de las baterías, y ya quedaría terminada la colocación del sensor de distancia, debiendo quedar más o menos como se ve en la siguiente imagen.
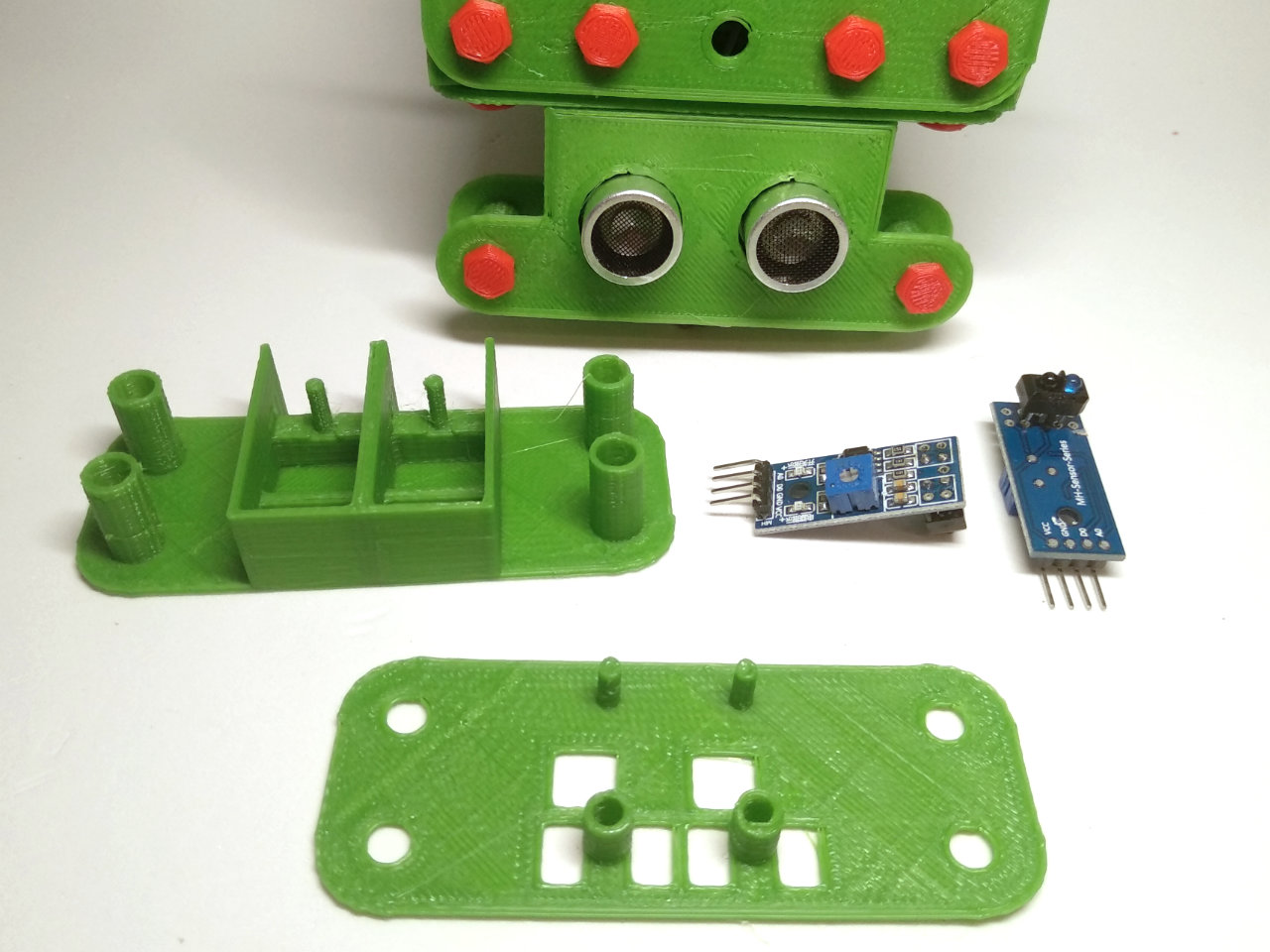
Sensores siguelíneas
Si vas a darle al robot la posibilidad de que funcione como un sigue líneas, deberás montarle un par de sensores TCRT5000 usando el soporte que también puedes obtener con una impresora 3D.
Conecta los pines de los sensores siguelíneas de este modo:
- VCC: Cable blanco que está conectado a uno de los pines rojos del lado derecho de la placa de conexiones, que debe tener 5 voltios.
- GND: Cable negro que está conectado a uno de los pines de la fila negra (GND) de la placa de conexiones.
- A0: Cable gris que está conectado al pin A0 (para el sensor derecho) y A1 (para el sensor izquierdo) de la placa Arduino.
Así podrían quedar los sensores conectados:
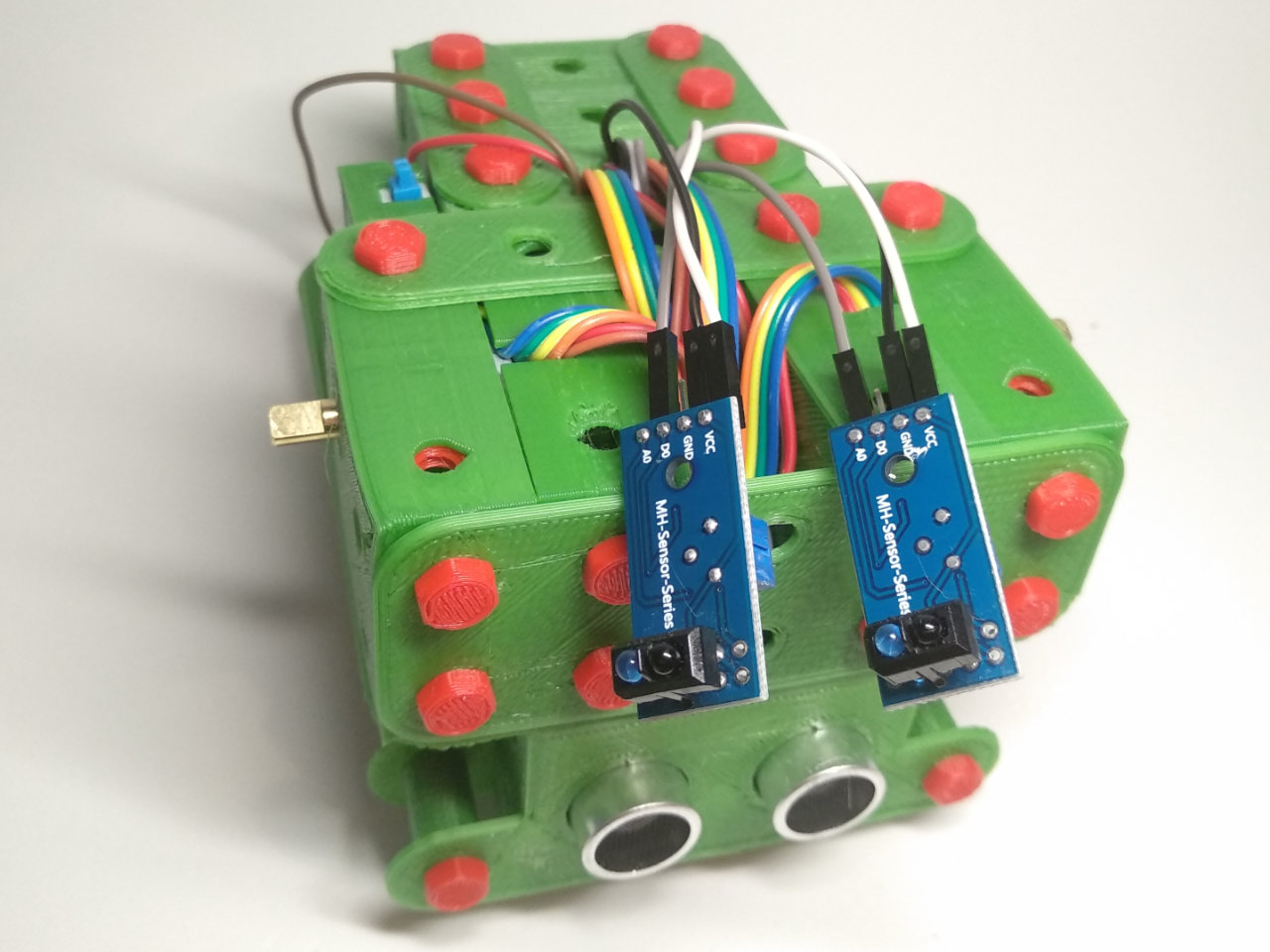
Coloca los sensores en si soporte como se muestra en la foto:
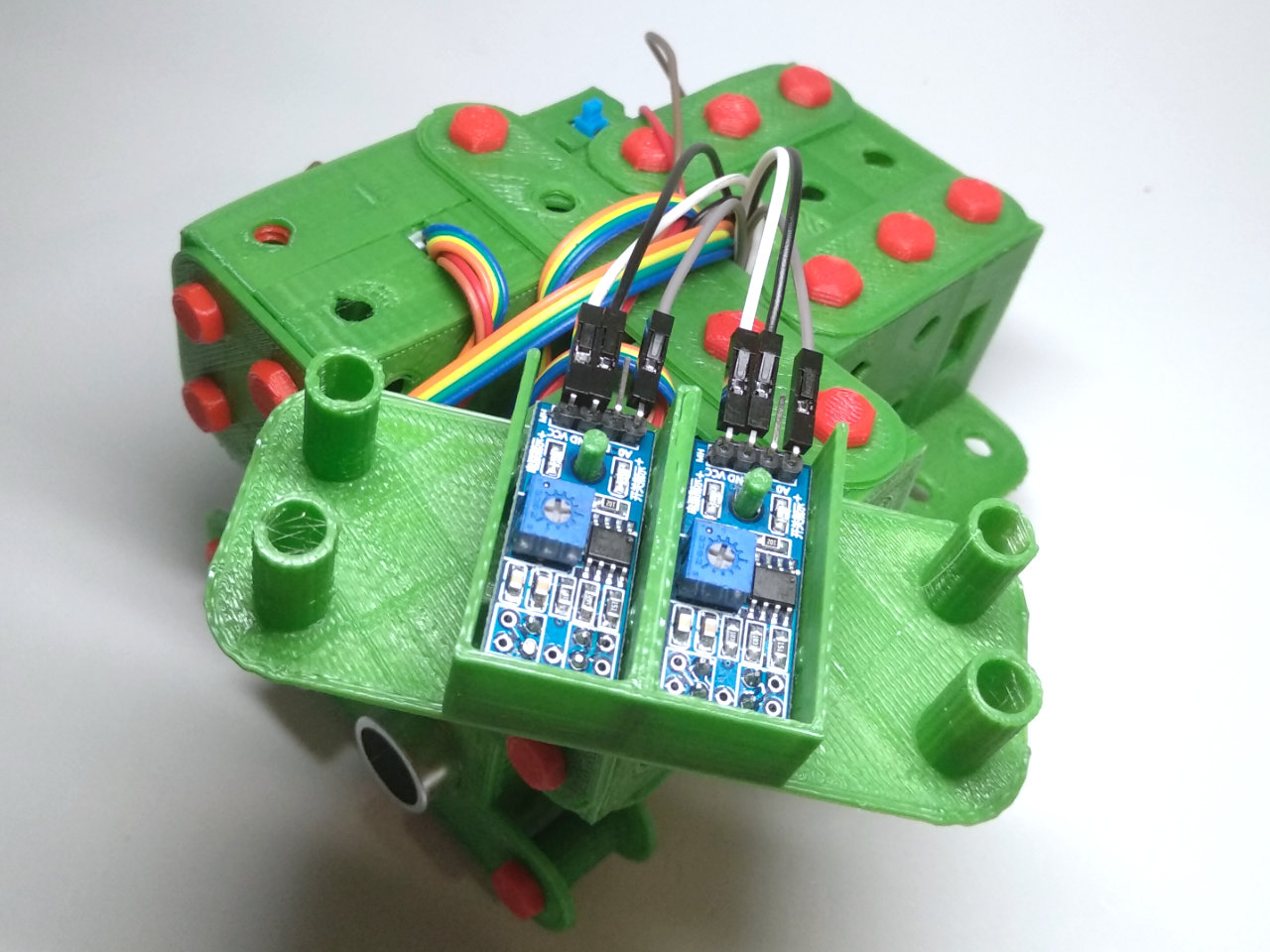
Coloca la otra parte del soporte de los sensores siguelíneas, uniendo ambas partes con 2 tornillos de 25 mm y 2 tuercas.
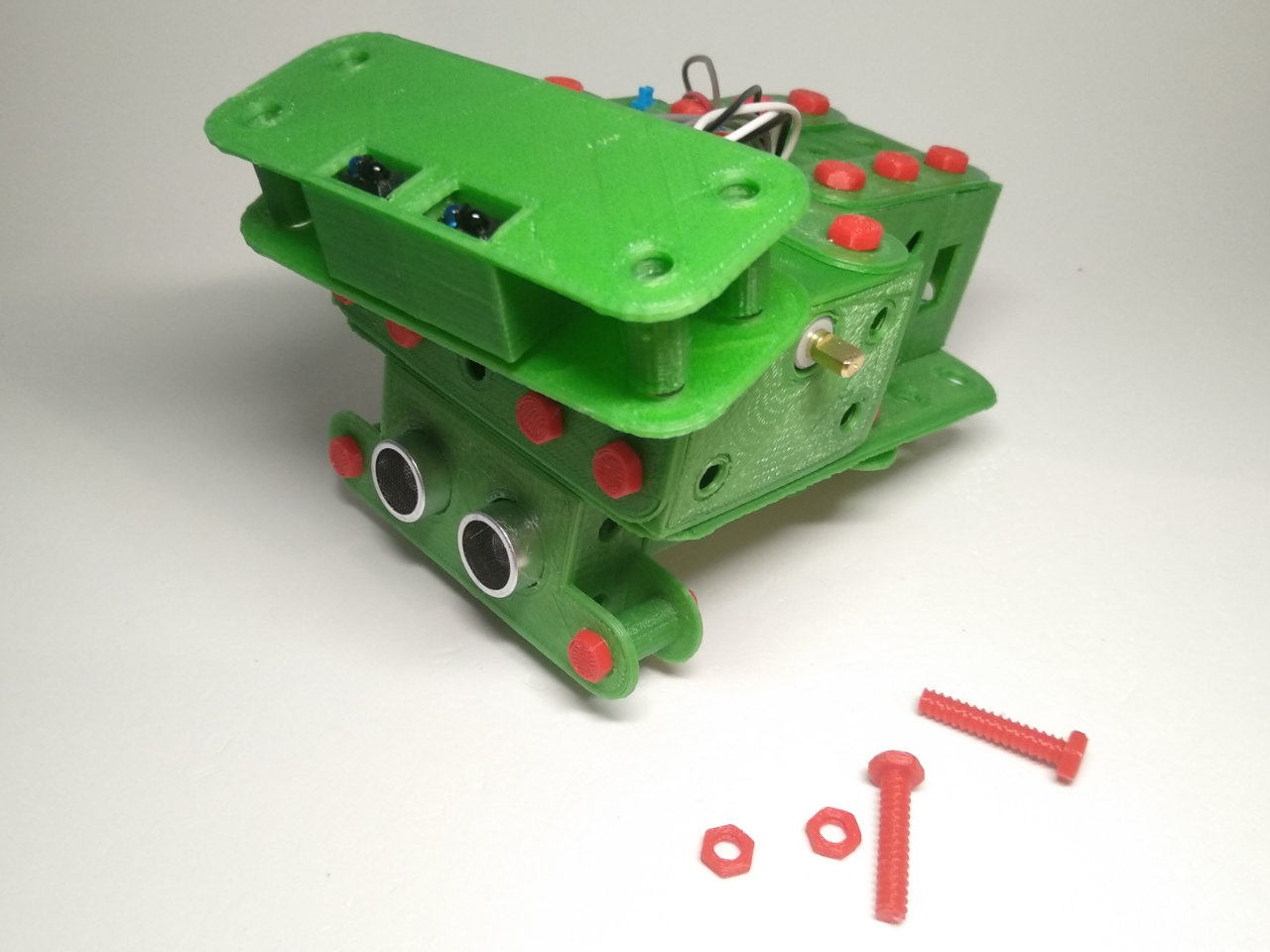
Para fijar el bloque de los siguelíneas, utiliza otros 2 tornilllos de 25 mm y 2 cilindros de 2,8 mm que hagan de separadores.
Esos tornillos deberán enroscarse como se muestra en la imagen, dejando los pequeños cilindros entre el bloque de los siguilíneas y los motores.
Apoyo trasero
Además de las 2 ruedas que se colocarán posteriormente, el robot va a necesitar un tercer apoyo en la parte trasera para mantenerse. Este apoyo va a consistir en una canica que pueda moverse libremente.
Este apoyo se va a aprovechar para enganchar una guía a modo de puntero que sirva de indicador para determinadas actividades que realice el robot y donde sea necesario que el robot señale un determinado lugar.
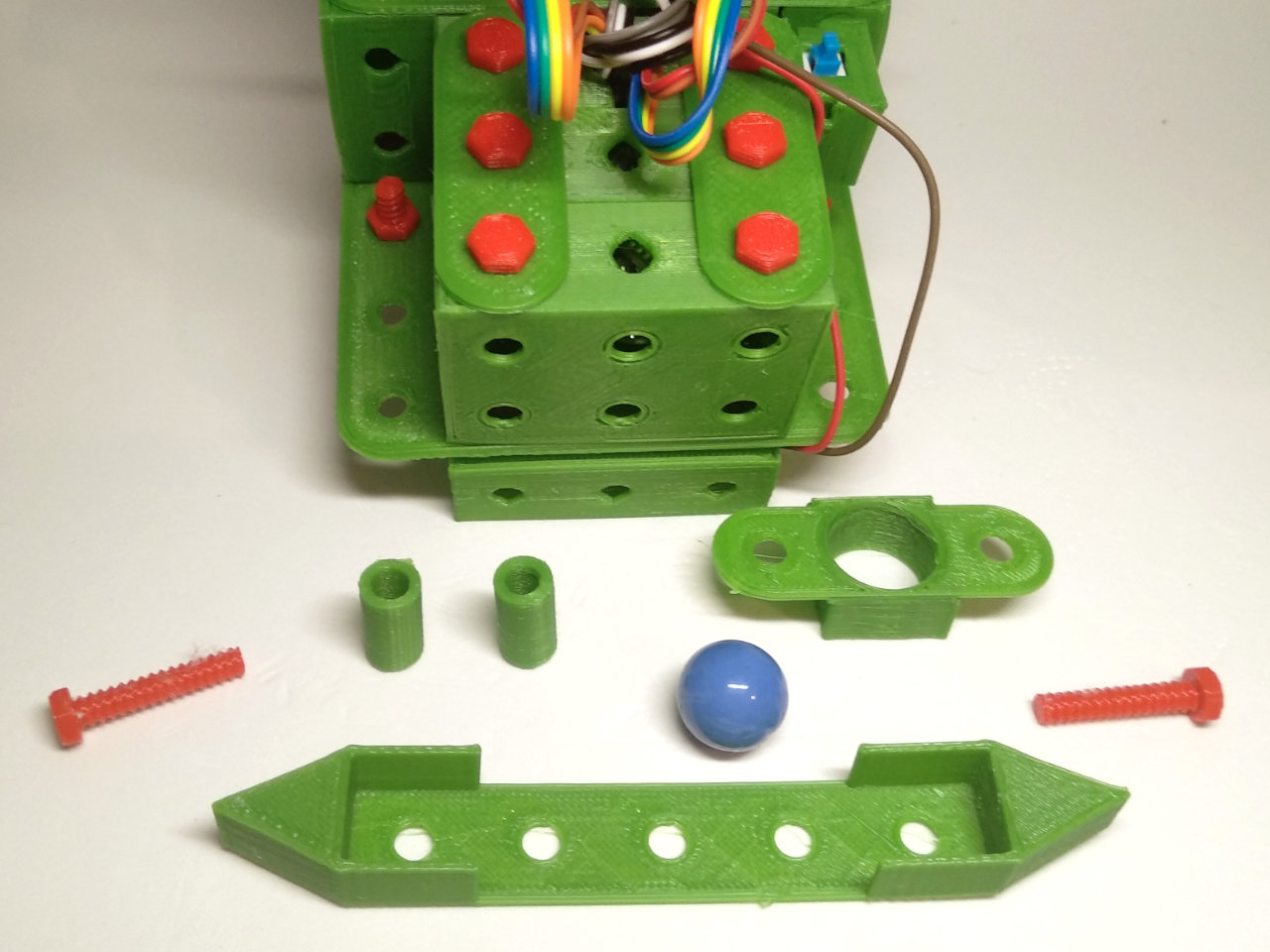
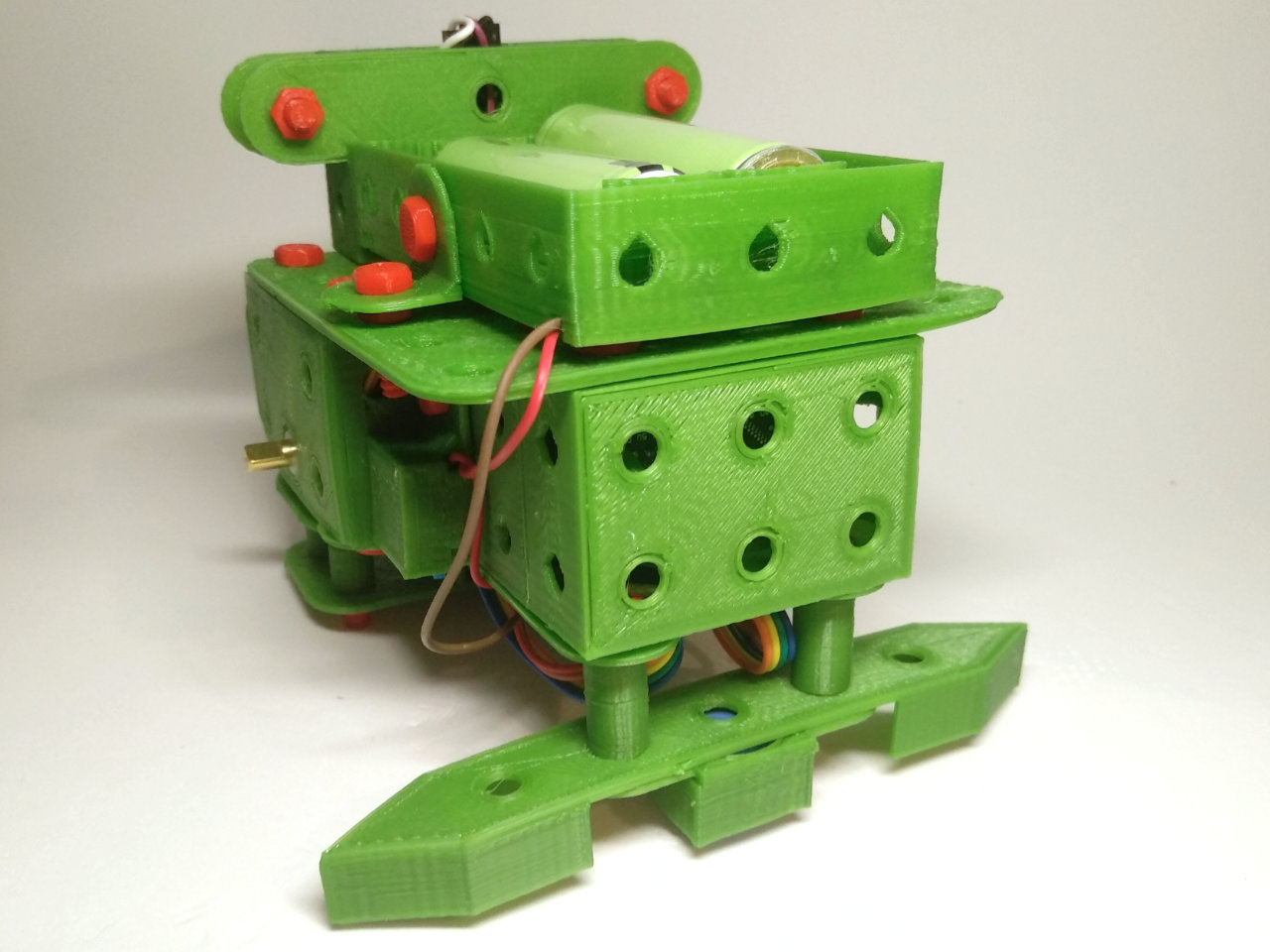
Prepara el soporte de la canica, el puntero, los 2 cilindros y los tornillos largos indicados.
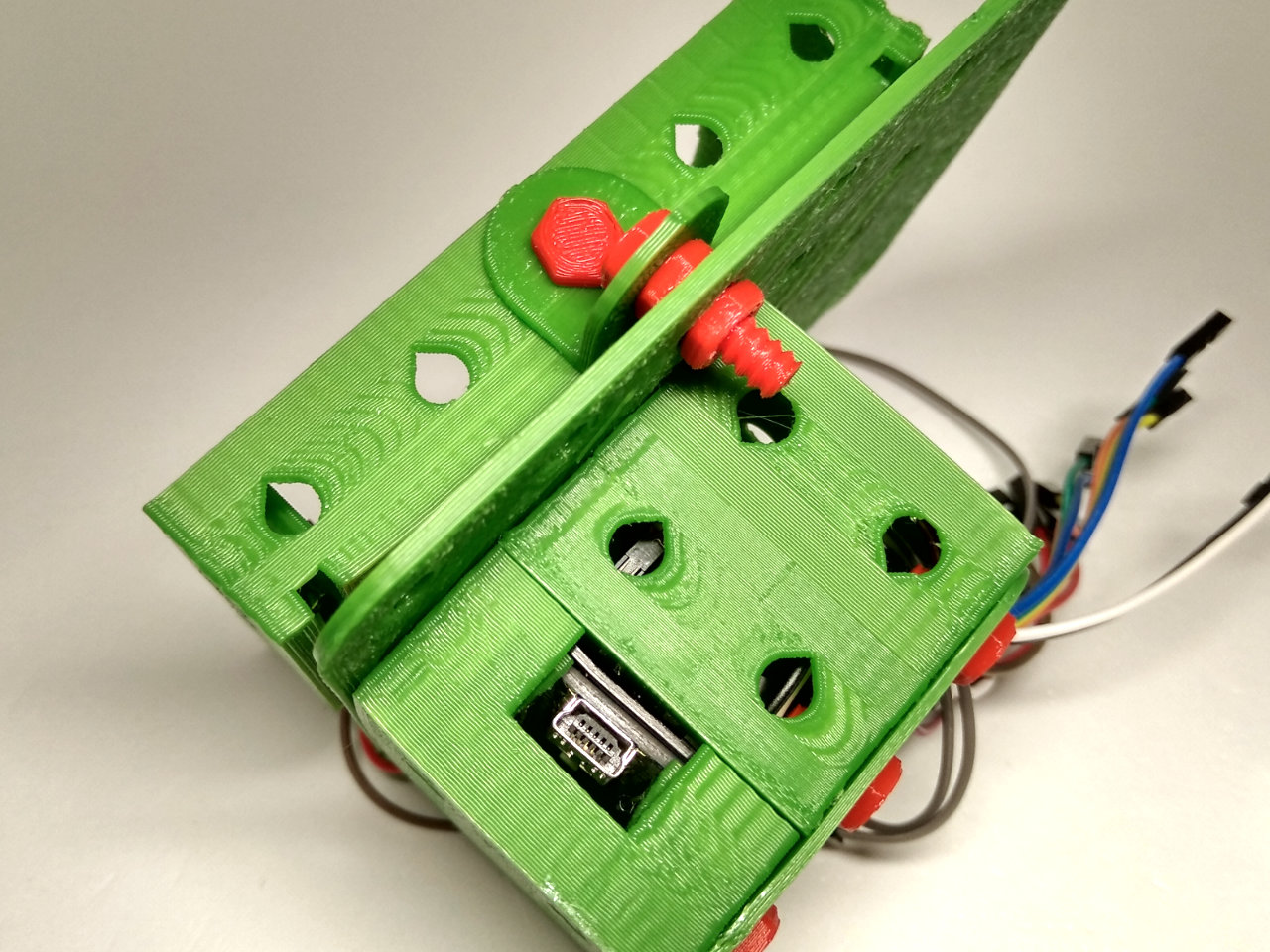
Introduce la canica en el soporte, y fija todo el conjunto como se muestra en la siguiente imagen. Ten en cuenta que necesitarás quitar los tornillos que ya se encontraban en la parte trasera para poder fijar los tornillos largos del apoyo.
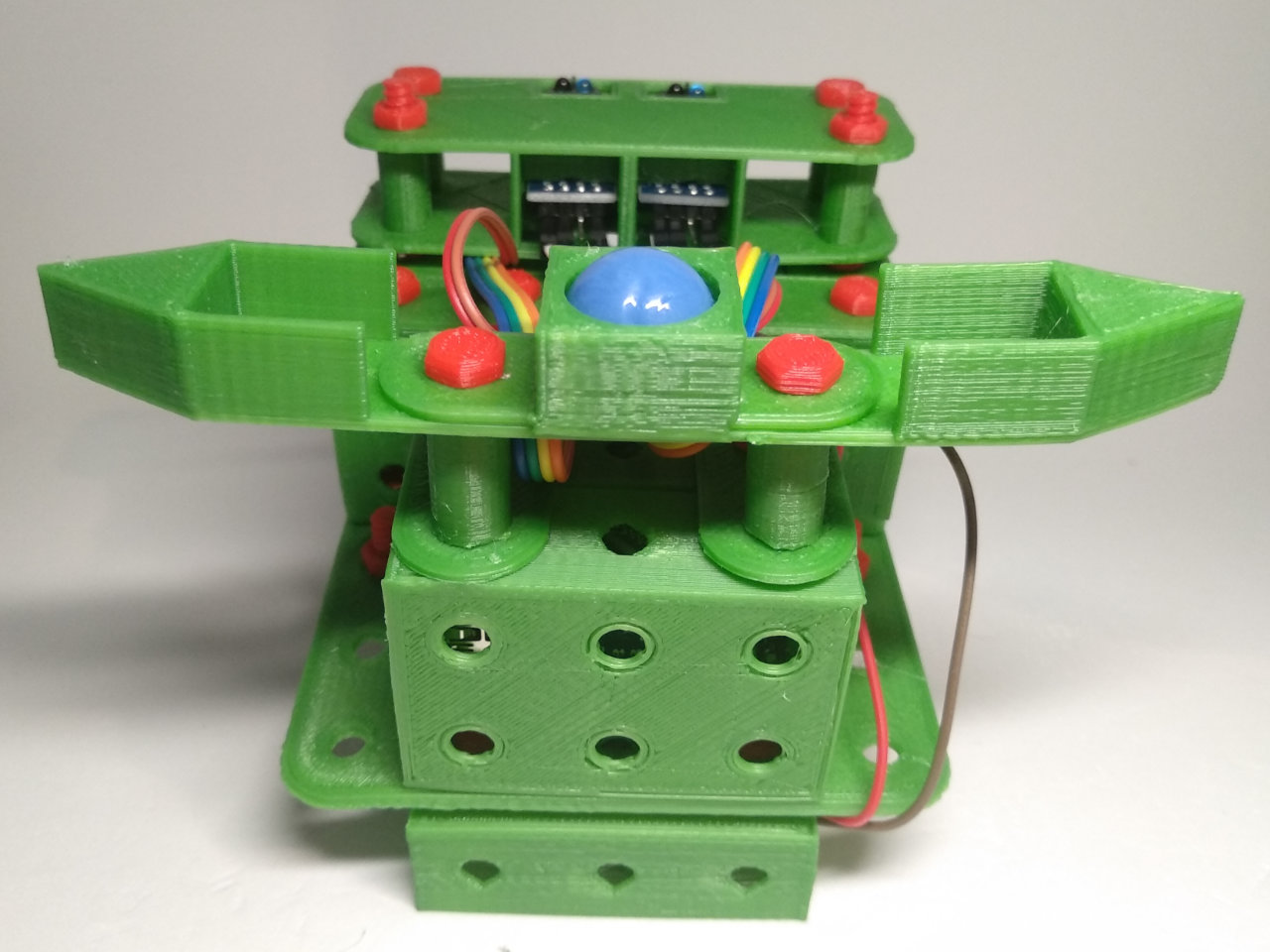
También puedes ver en esta otra imagen cómo debería quedar este apoyo trasero.
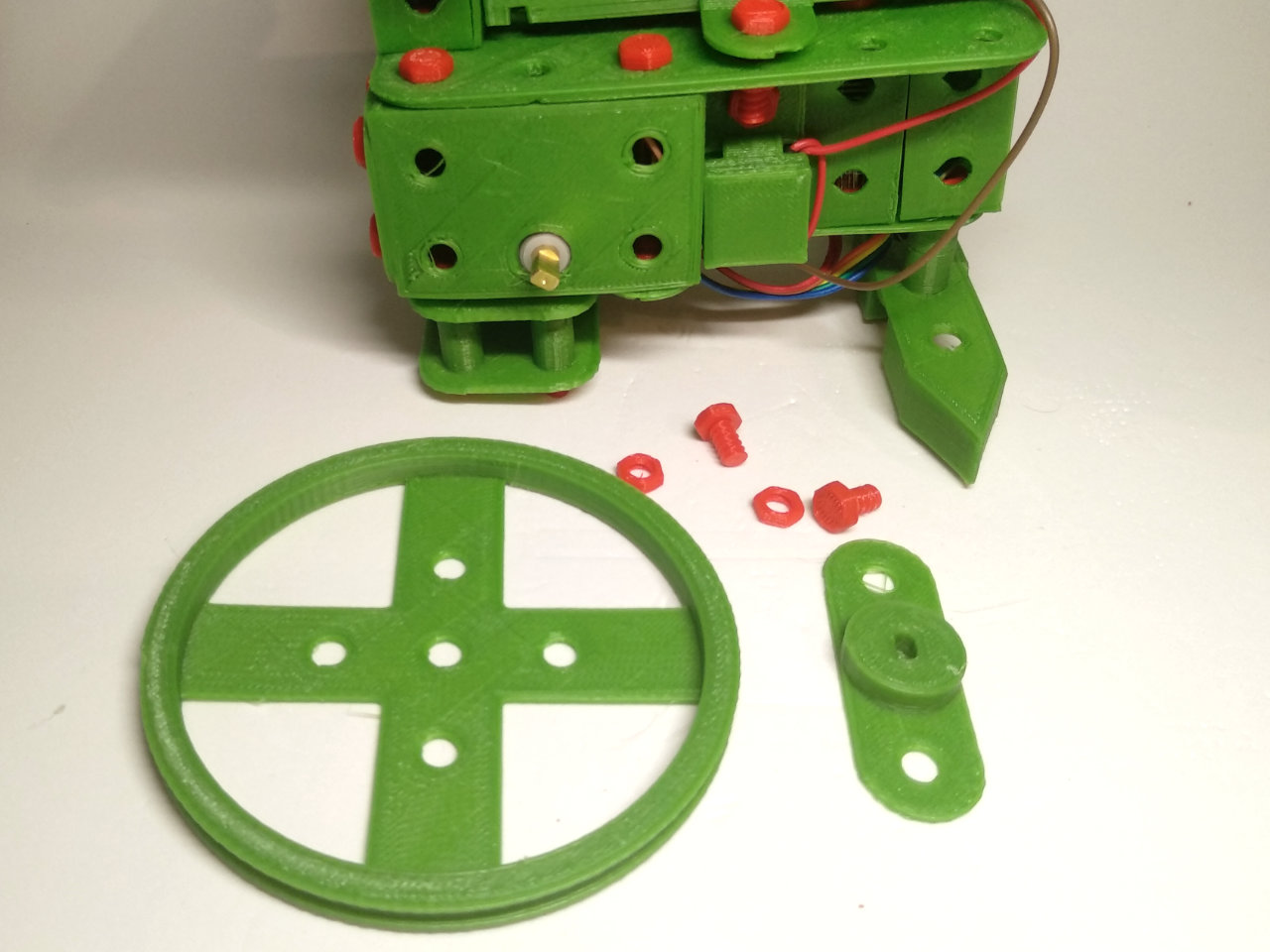
Ruedas
Para colocar las ruedas necesitarás la pieza que encaja en el eje del motor al que fijarás la rueda con 2 tornillos de 8 mm y 2 tuercas.
Encaja el adaptador en el eje del motor haciendo presión, y asegurándote de que la forma del eje coincida con la forma del hueco del adaptador. Usa los tornillos y las tuercas para fijar la rueda al adaptador.
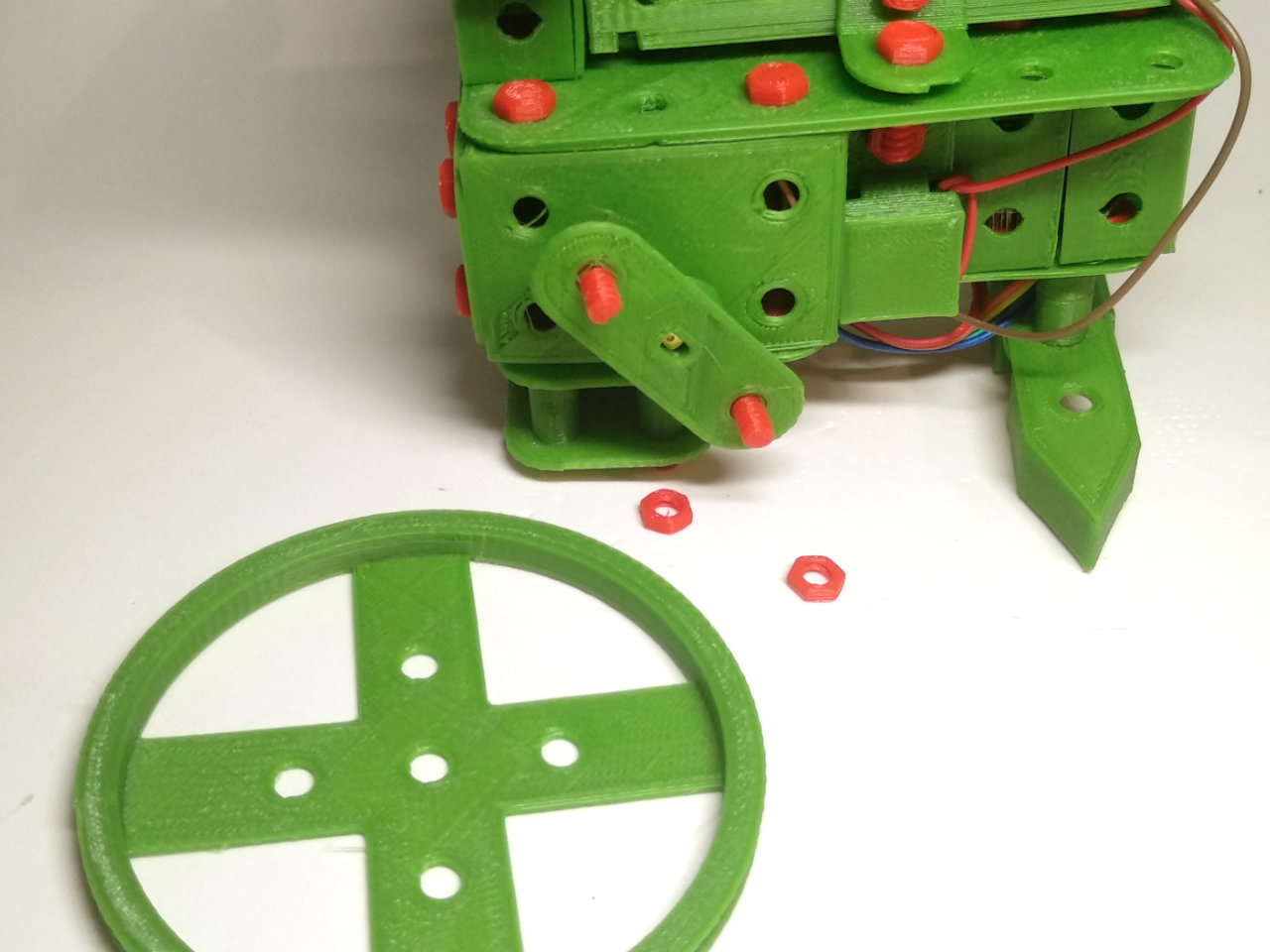
Esto mismo deberás repetirlo para la rueda del lado contrario.
Tapa del soporte de baterías
Para dejar tapadas la baterías usa la tapa del soporte que fijarás con 4 tornillos de 8 mm y 4 tuercas.
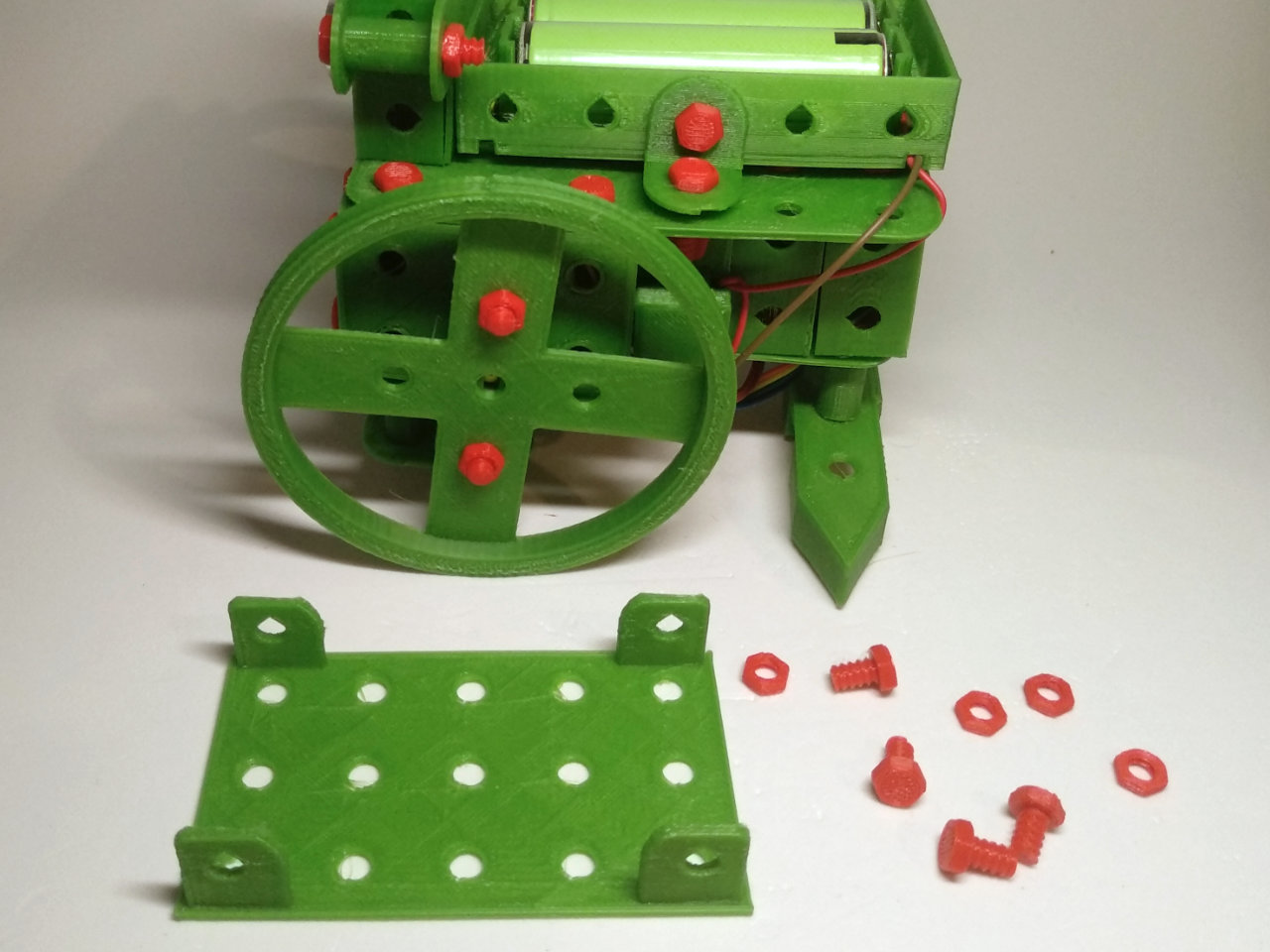
Pega las 4 tuercas en la parte interior de las pestañas salientes de la tapa.
Coloca la tapa en el soporte de las baterías, y déjala fijada con los 4 tornillos en los mismos orificios donde están las tuercas.
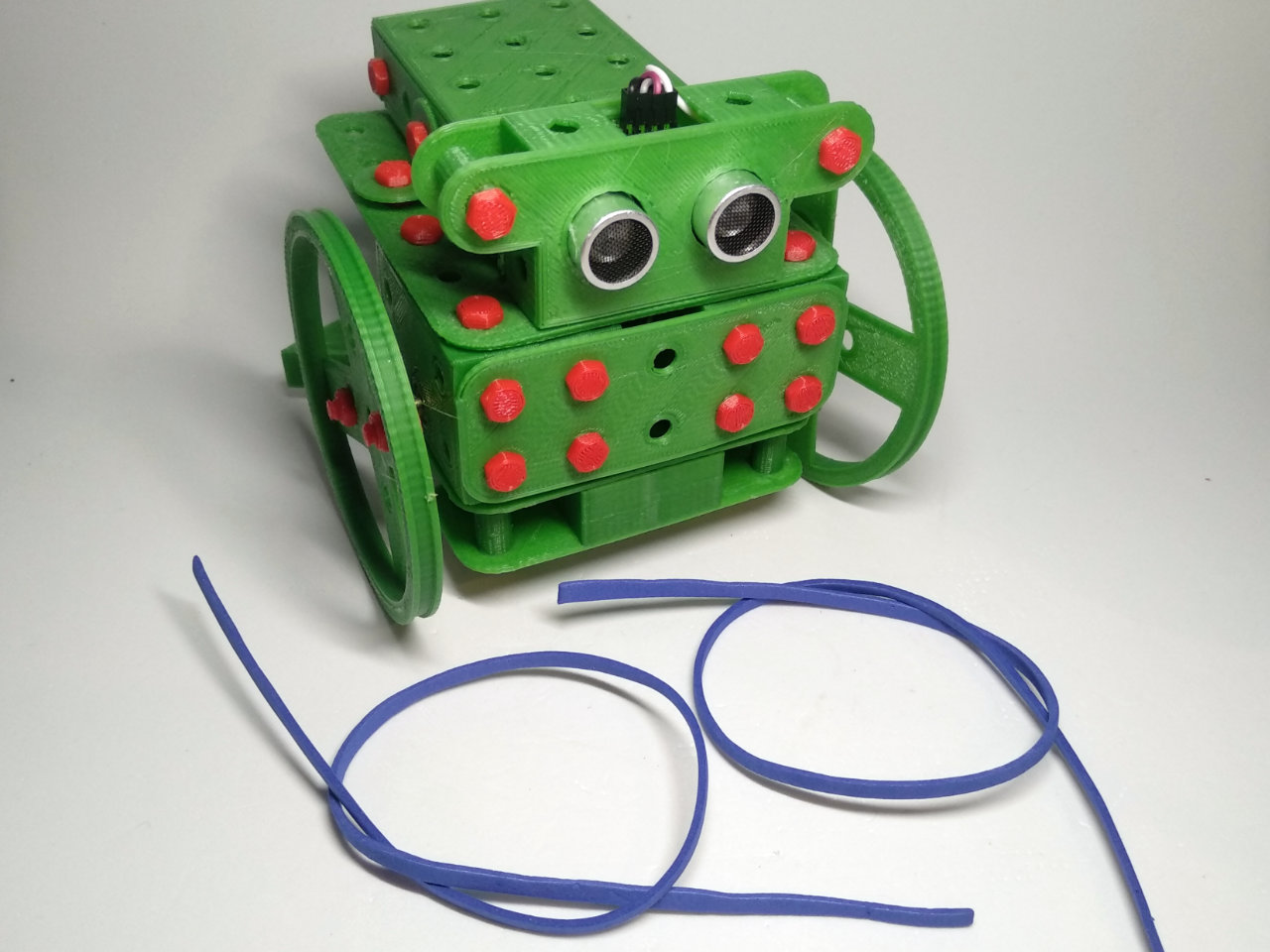
Antideslizante para las ruedas
Corta 2 tiras de goma EVA que van a servir para evitar que las ruedas patinen al girar en algunas superficies. El ancho de las tiras debe ser algo menor que el ancho de las ruedas, y deben tener el largo suficiente para cubrir todo el contorno de cada rueda.
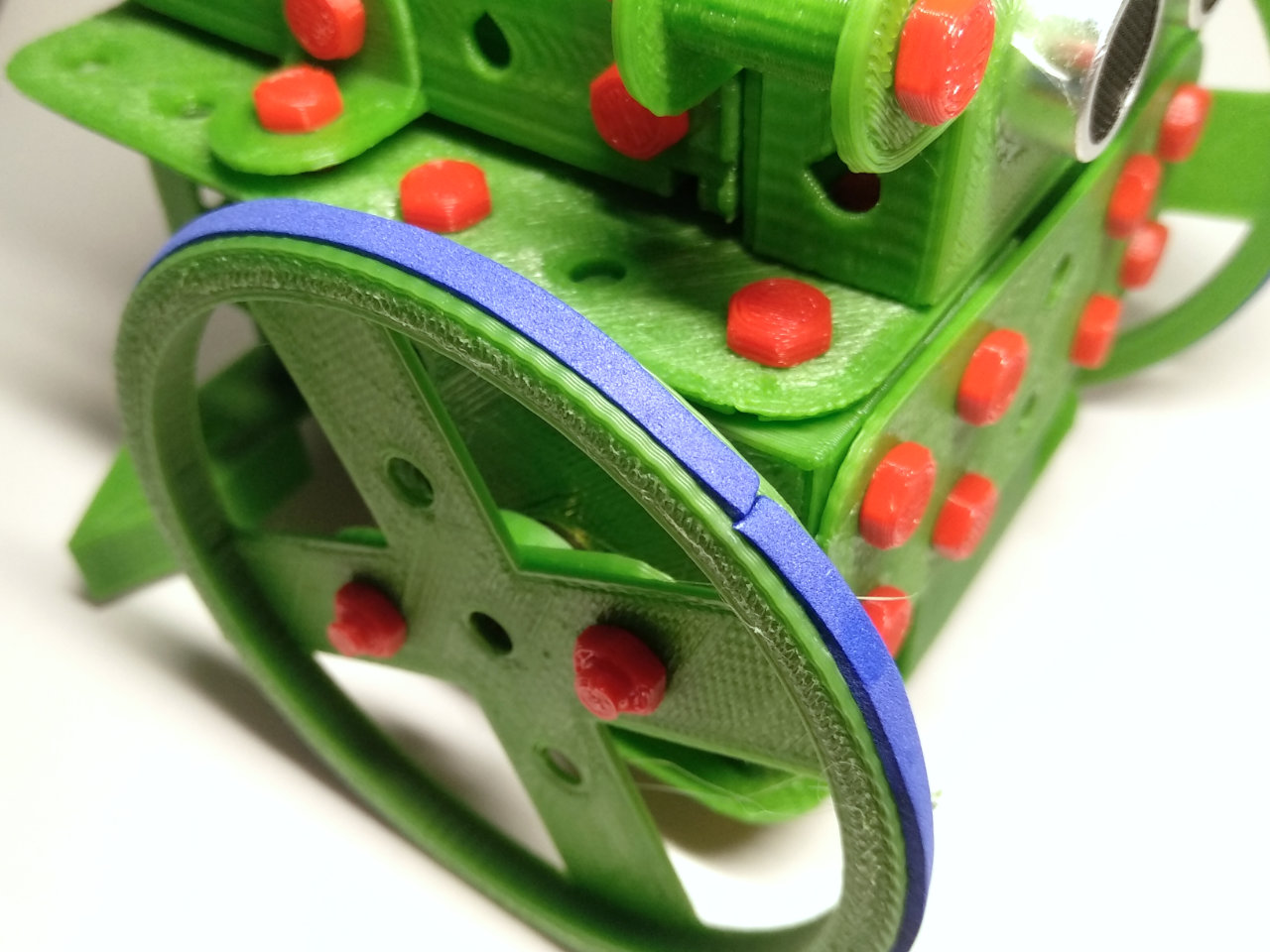
Pega las tiras en los contornos de las ruedas, y corta el sobrante.
Resultado final
Con esto ya habrás finalizado el montaje del robot. Ahora te quedará programarlo para que realice las funciones que desees. Para ello deberás conocer cómo programar con Arduino los motores 28byj, el sensor de distancia HC-SR04, el módulo Bluetooth HC-06 y los siguelíneas TCRT5000.