En este artículo podrás conocer cómo conectar un servomotor de tipo SG90, o cualquiera similar, a la placa Arduino usando la placa de conexiones para robótica que se ha usado en otros artículos de este sitio web. Se usarán 2 baterías 18650 en serie para la alimentación eléctrica, proporcionando unos 7 voltios que es aproximadamente el voltaje máximo que pueden admitir estos tipos de motores.
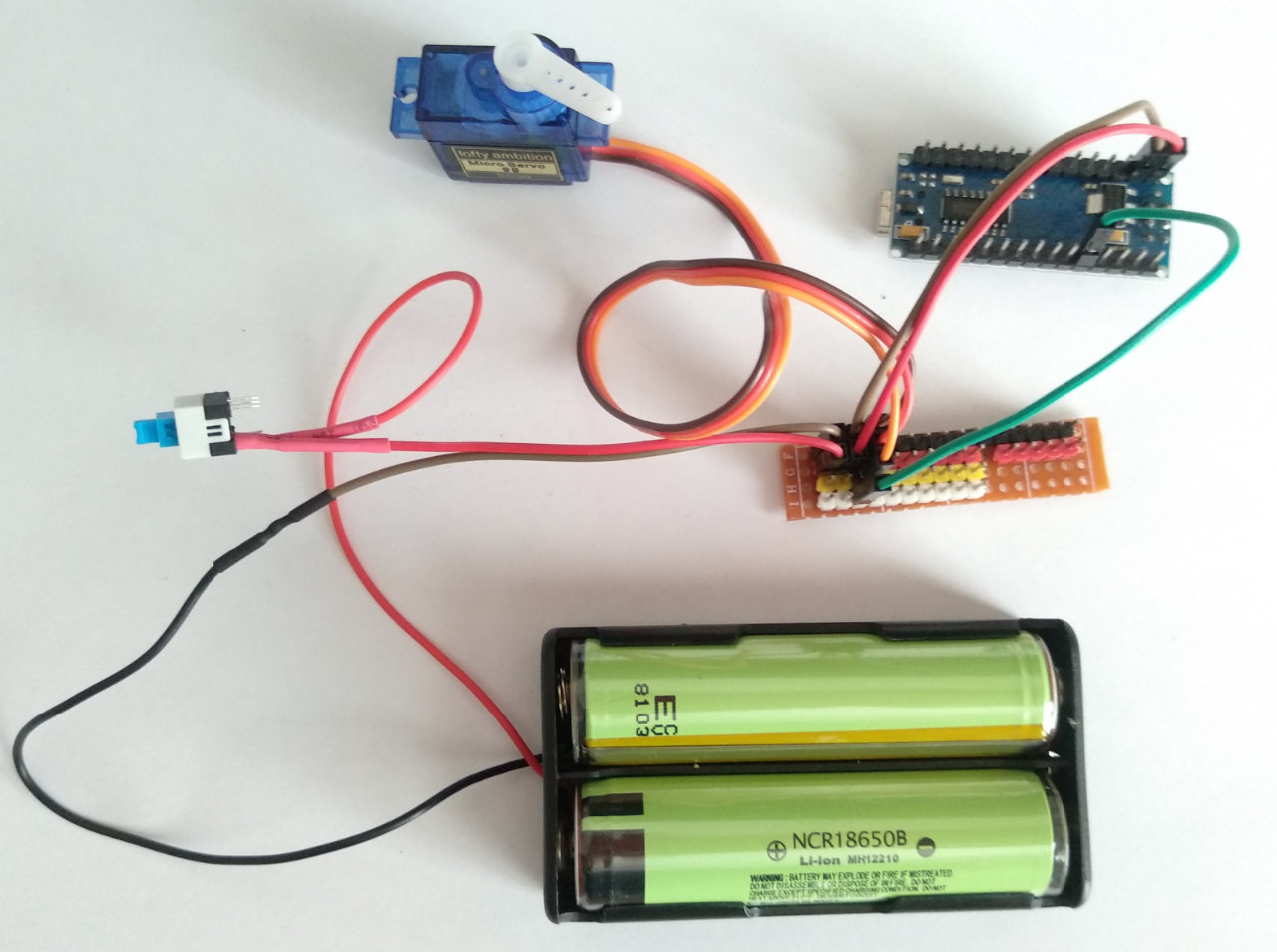
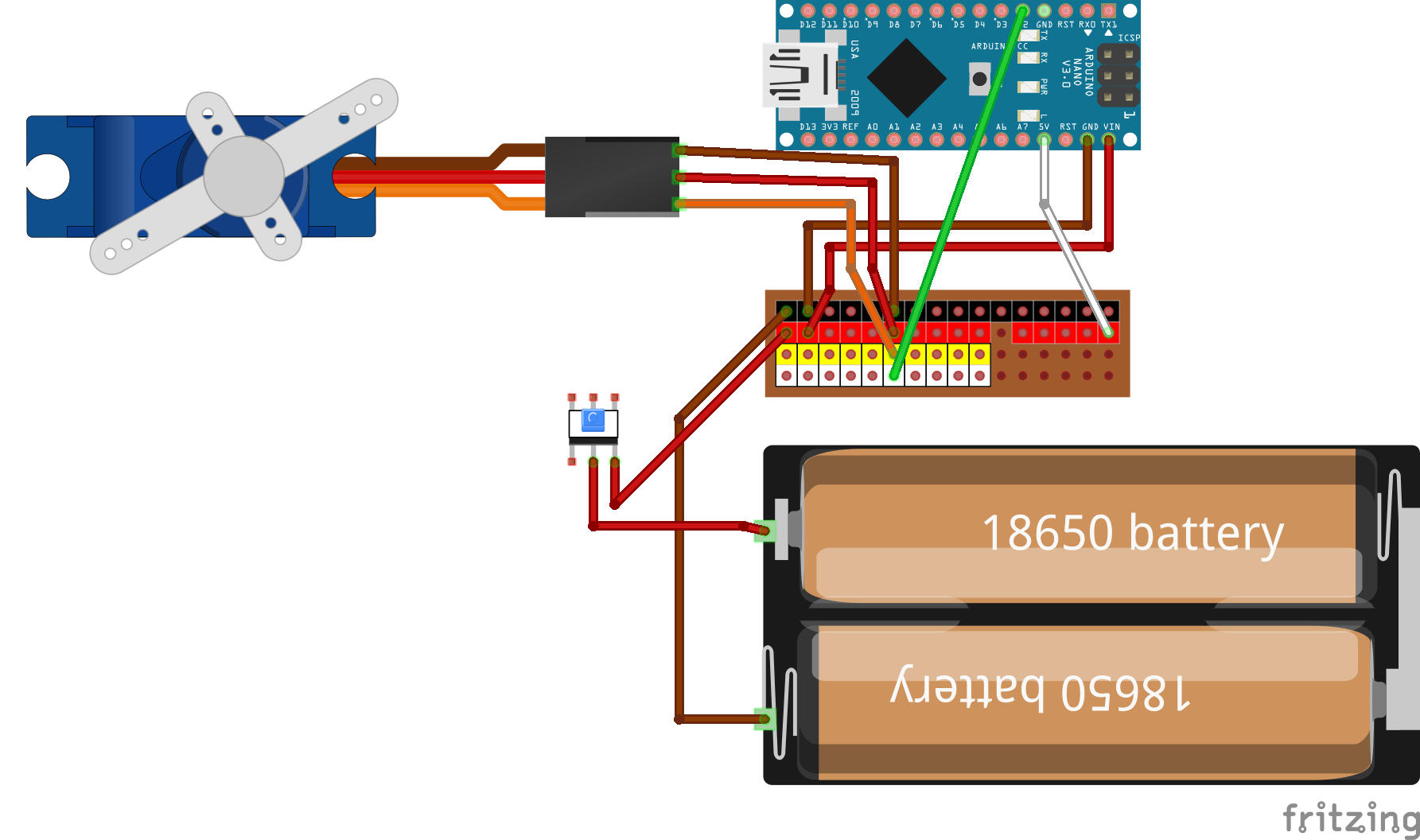
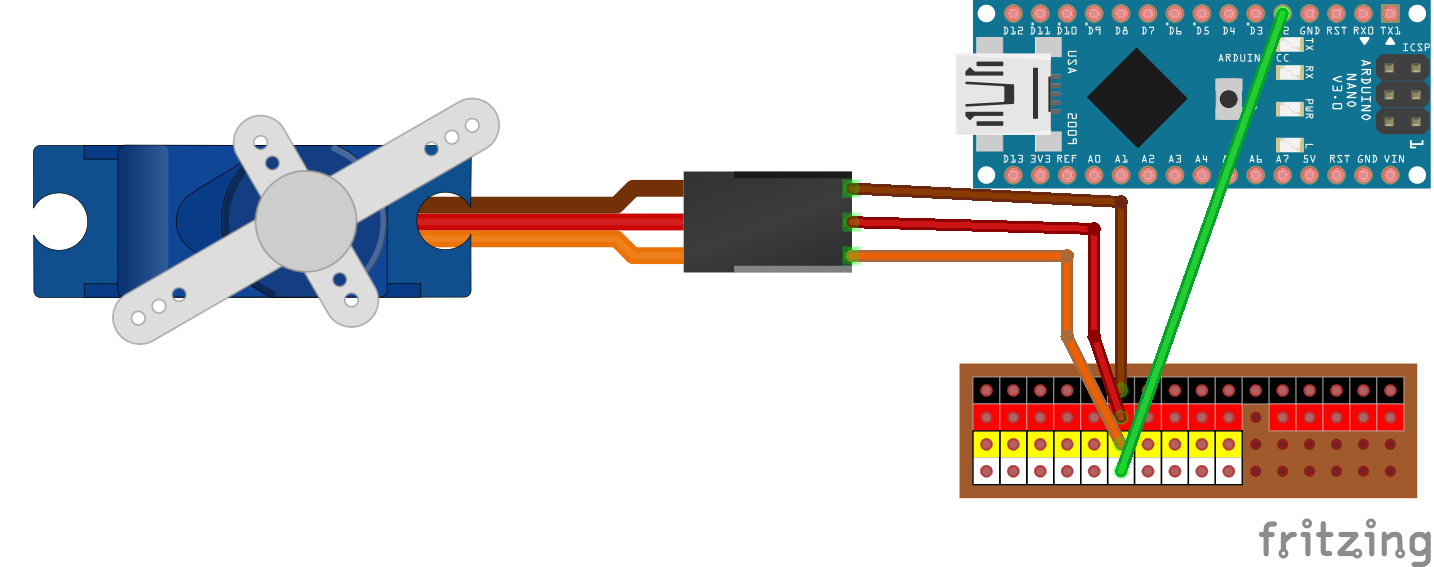
En la siguiente imagen puedes ver cómo quedaría finalmente el esquema de conexión del servomotor, cuyo montaje se va a detallar más adelante en este mismo artículo:
Conexiones paso a paso
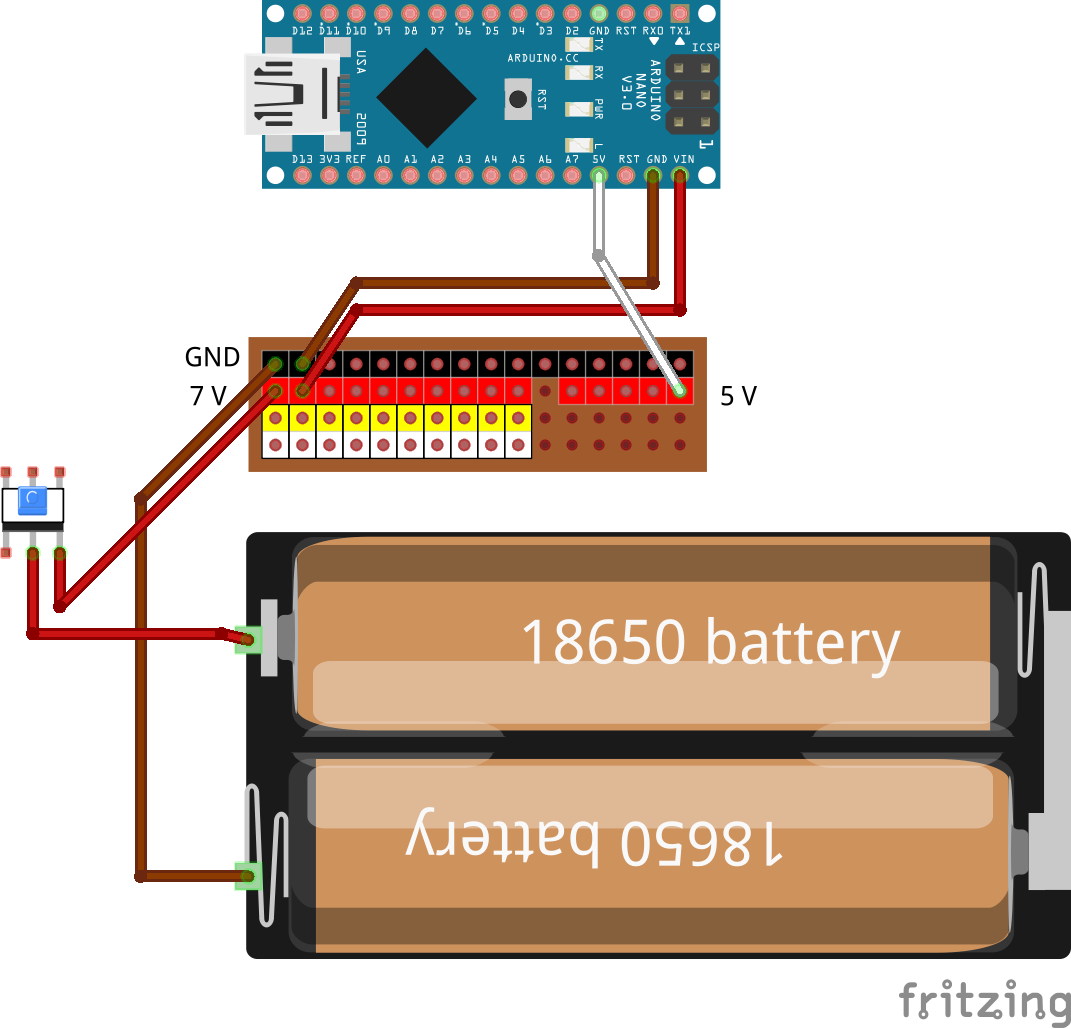
Como paso inicial debes tener correctamente conectada la placa Arduino a la placa de conexiones y a la alimentación eléctrica de las baterías.
Los colores de los cables del servomotor SG90 corresponden a las siguientes conexiones:
- Marrón: GND (-)
- Rojo: VCC (+)
- Naranja: PWM (Señal de control)
El conector del servomotor se debe conectar directamente a la placa de conexiones, asegurando que el cable marrón del motor se conecte a la fila de pines GND (negro) de la placa de conexiones. Recuerda que la fila representada en negro de la placa de conexiones corresponde al polo negativo (GND) de las baterías, y la fila de pines rojos corresponden al polo positivo de las baterías. Por tanto, el cable marrón del servomotor debe hacer contacto con la fila negra, y el cable rojo con los pines rojos de la placa de conexiones.
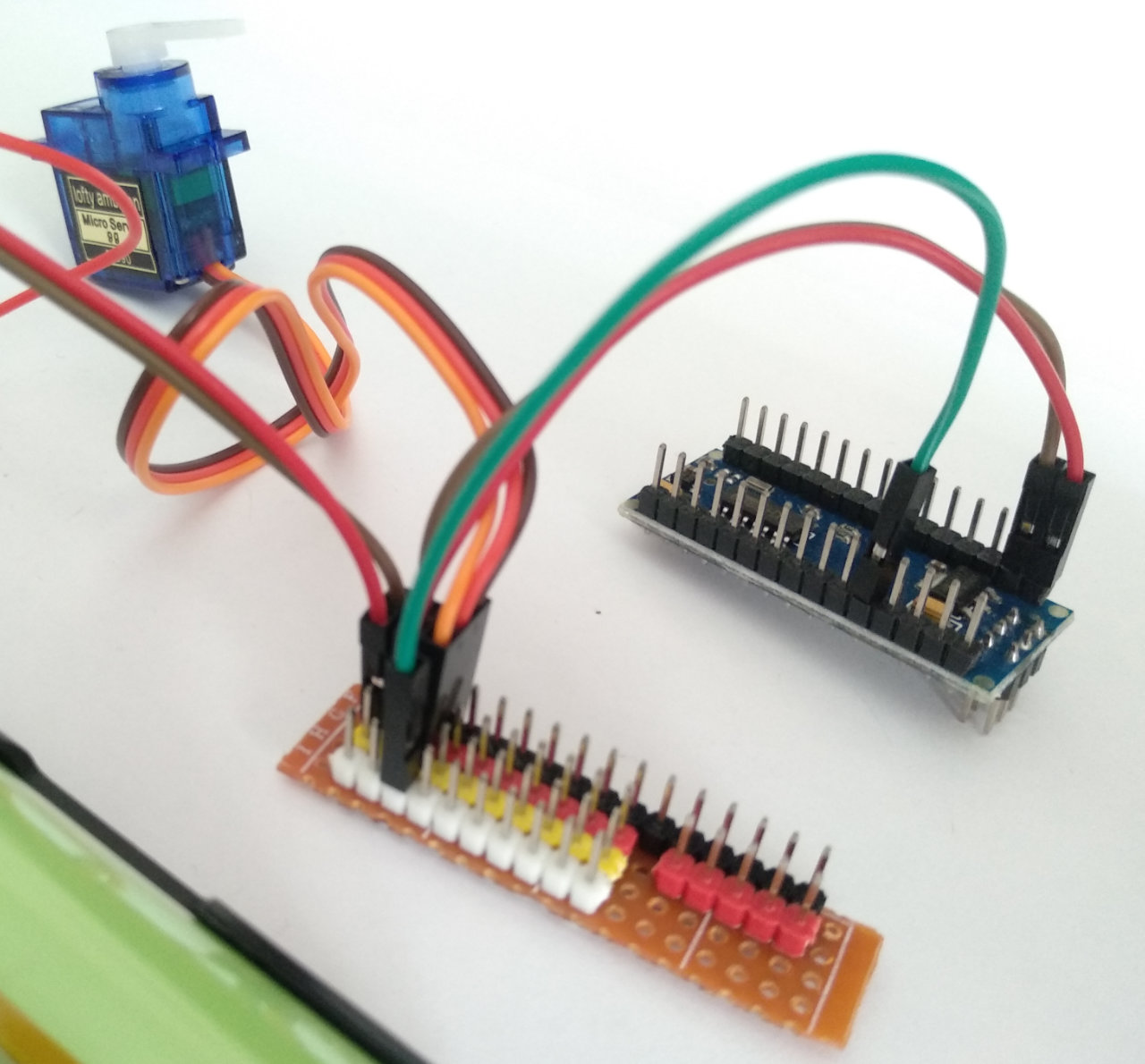
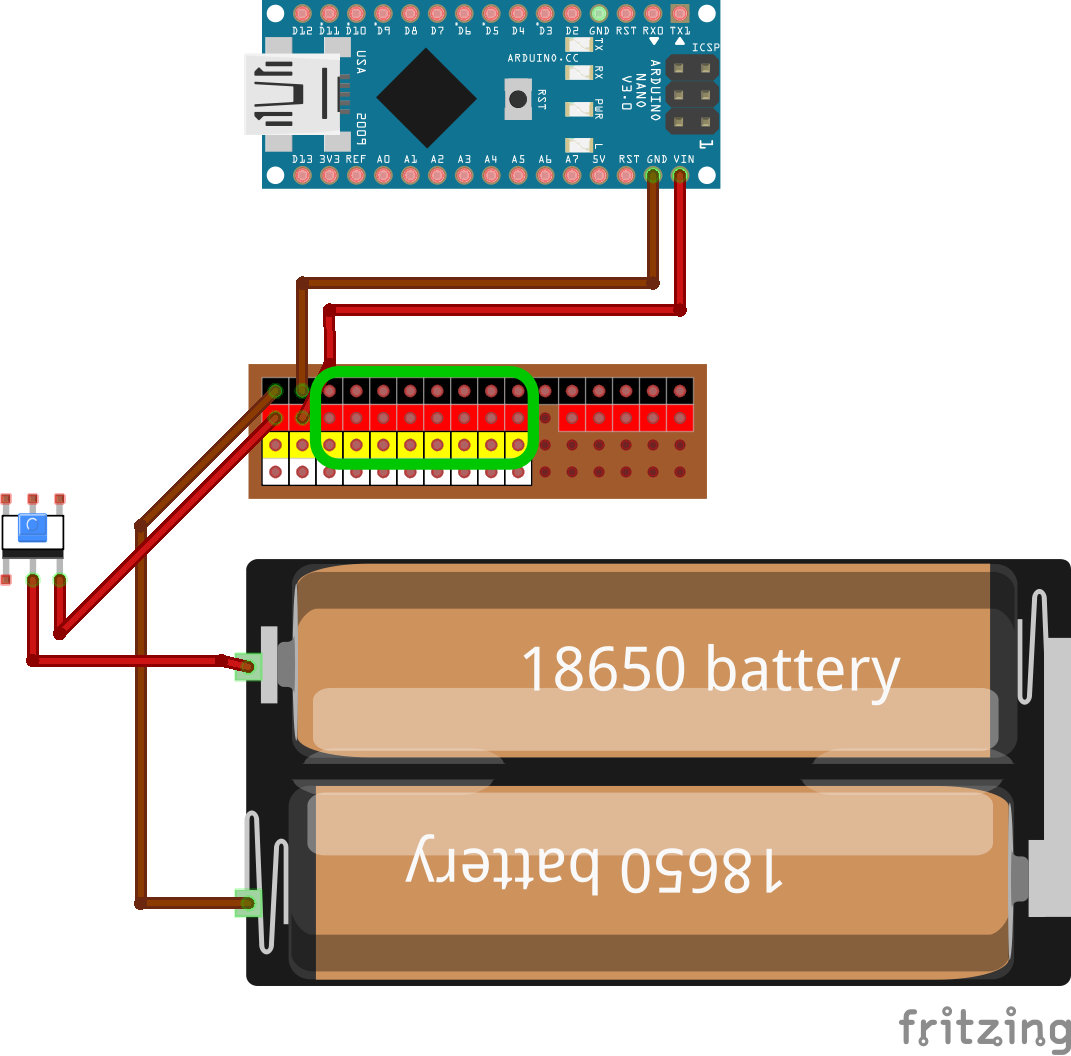
Se podrá conectar a cualquier grupo de pines de la placa de conexiones del lado que es alimentado directamente por las baterías. Es decir, se podrá conectar el servomotor en cualquier grupo de 3 pines que se marca en verde en la siguiente imagen (podrás unir directamente el propio conector del servomotor a la placa de conexiones sin necesidad de usar más cables).
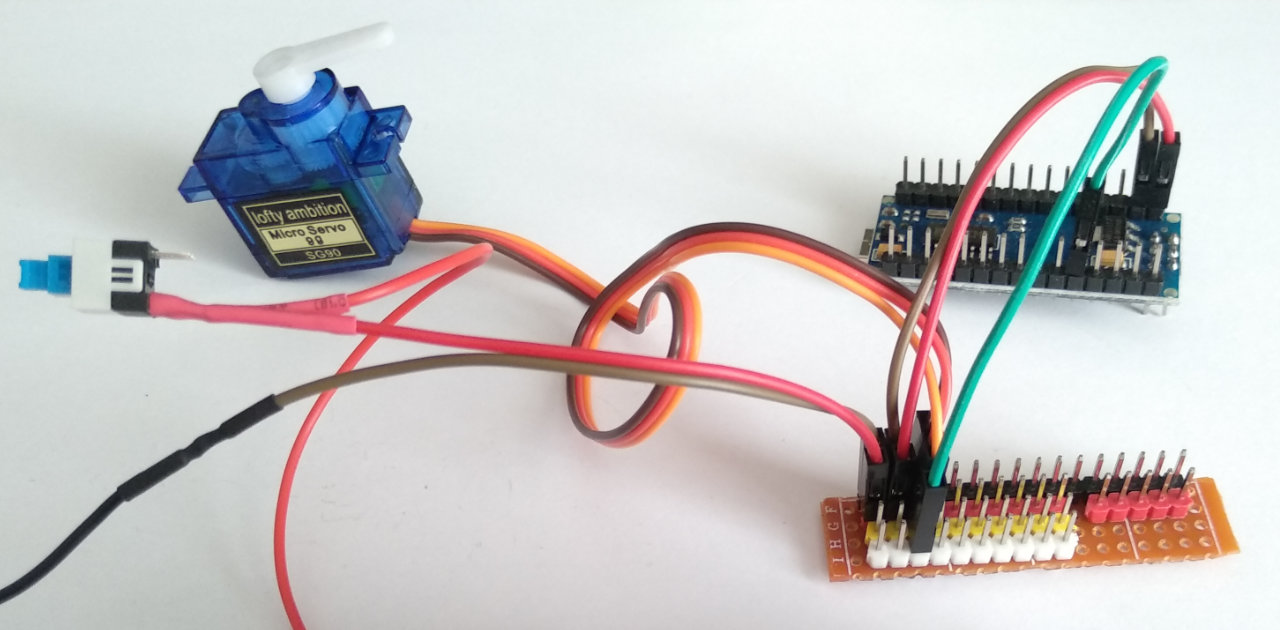
En la siguiente imagen puedes ver cómo puede quedar conectado el servomotor:
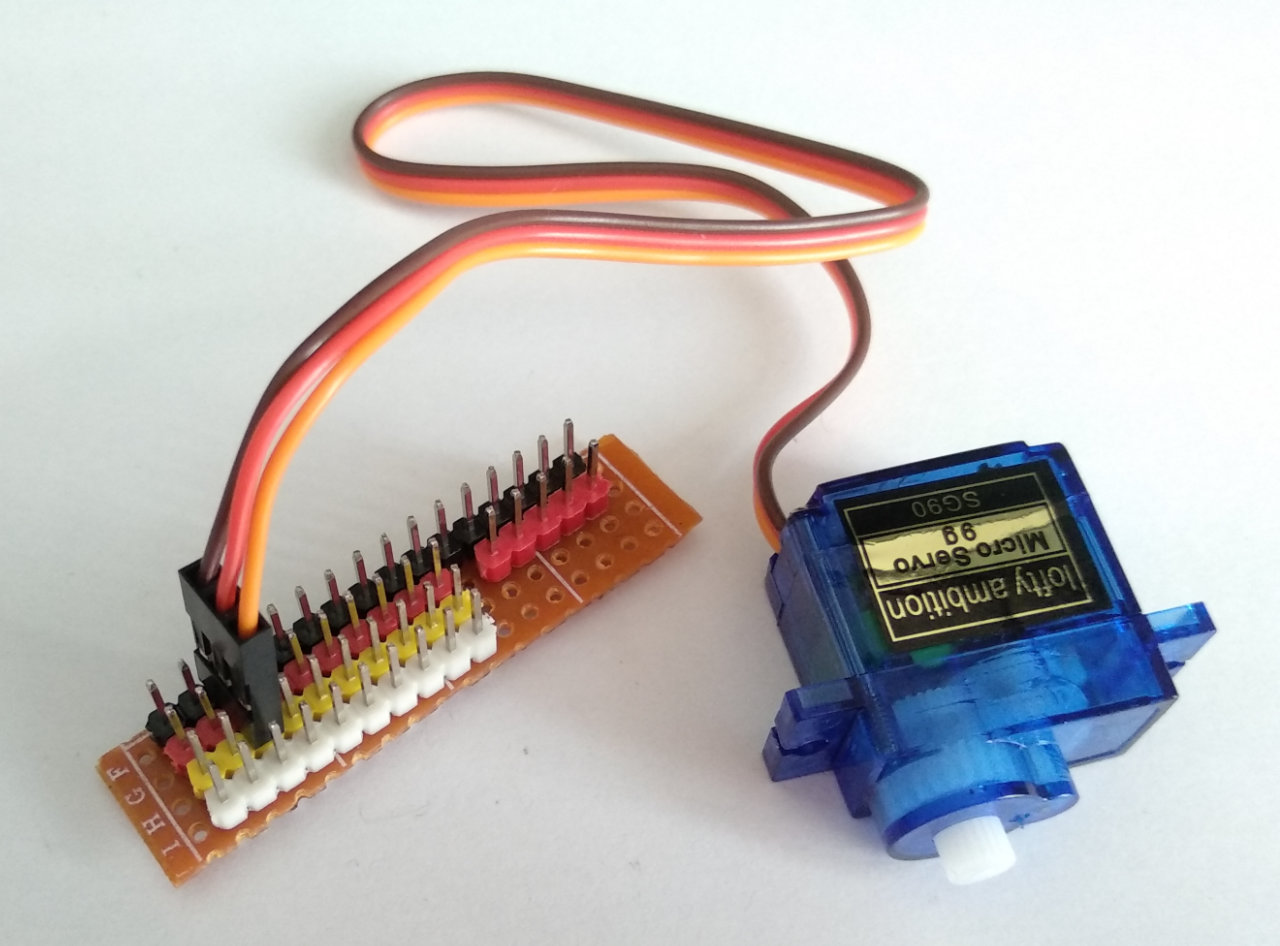
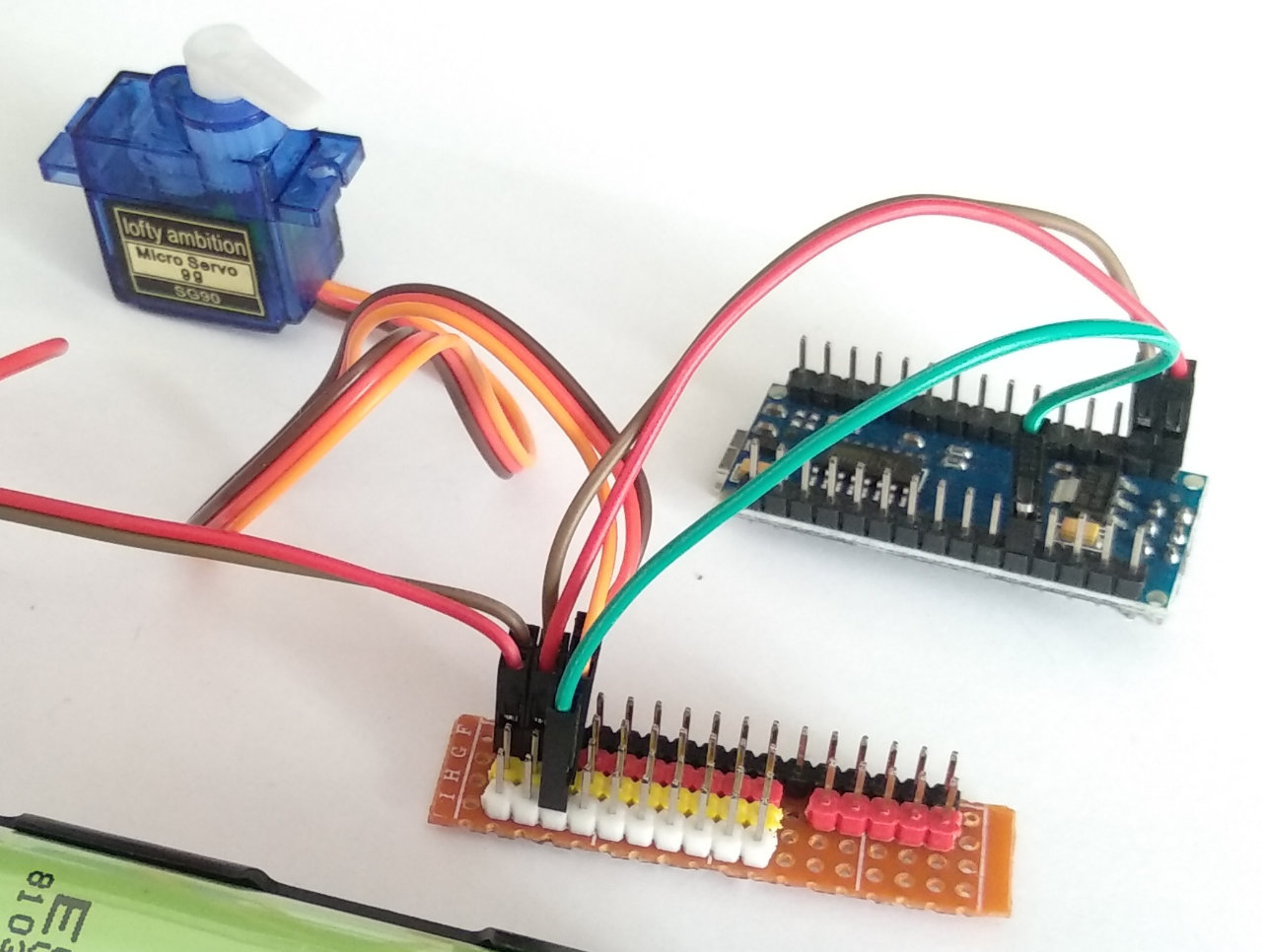
La señal de control del servomotor (cable naranja del motor) debe conectarse a uno de los pines digitales de la placa Arduino (D2, D3, D4, ...). En este ejemplo se va a conectar la señal de control del servomotor al pin digital 2. Para ello se debe usar un cable dupont hembra-hembra (cable verde en el siguiente esquema) que conecte el pin 2 de Arduino con el pin libre (blanco) de la placa de conexiones justo al lado del grupo donde se haya colocado el conector del servomotor. Ya que los pines representados como blancos y amarillos en la placa de conexiones están emparejados entre sí 2 a 2 mediante las soldaduras, la conexión realizada equivale a unir el pin de la placa Arduino al cable naranja del servomotor.
Mira en las siguientes fotos cómo podría quedar el conjunto: