Conexión de cables de motores a la tarjeta controladora
En este artículo vas a poder observar cómo se puede colocar el cableado de un Smart-Car para Arduino, cuyo montaje has podido seguir previamente a través del artículo Montaje del chasis de Smart Car Arduino.
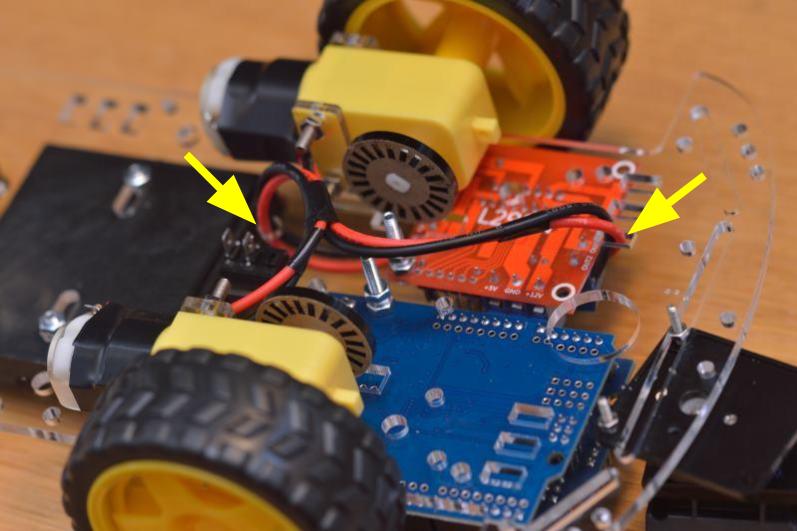
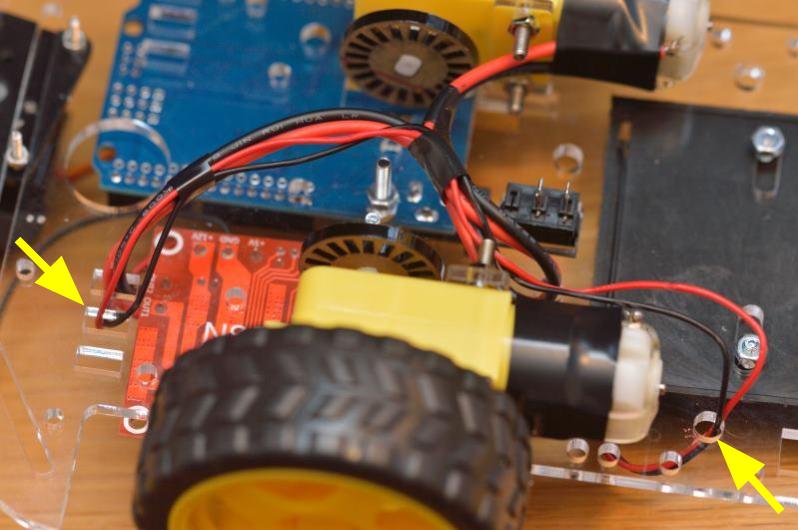
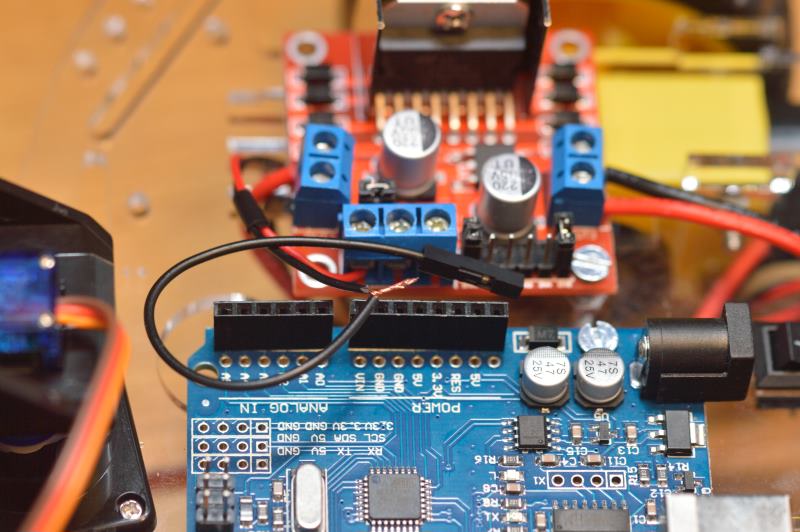
Los cables rojo y negro de cada motor deberá conectarse a la tarjeta controladora (L298N) de los motores que es la de color rojo. Ya que deberás introducir los cables de cada uno de los motores por distintos lados de dicha tarjeta, puedes introducir cada pareja de cables por los agujeros que encuentres más cerca de cada lado de la tarjeta, por la parte inferior del chasis del coche. En la siguiente foto puedes ver, indicadas con flechas amarillas, los huecos que se han elegido en este montaje.
En la tarjeta L298N puedes encontrar 4 conexiones etiquetadas como OUT1, OUT2, OUT3 y OUT4. En este montaje se han conectado los cables del motor derecho (visto como si estuvieras sentado en el coche) en las conexiones OUT1 (rojo) y OUT2 (negro). Los cables del motor izquierdo se han colocado en OUT3 (rojo) y OUT4 (negro).
Conexión del cableado de las pilas
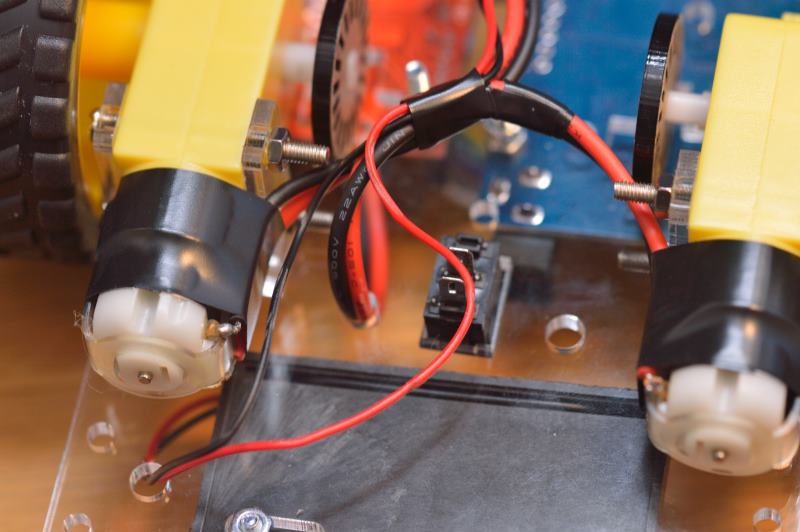
Las pilas que se pueden colocar en el porta-pilas que trae el kit se pueden utilizar para alimentar esta misma tarjeta L298N que permitirá controlar los motores de las ruedas. Los dos cables de este porta-pilas deberán conectarse también a esa misma tarjeta, por lo que deberías introducirlos por algún hueco del chasis que permita pasarlos en primer lugar hacia la parte inferior del chasis, y luego lo más cerca posible de las conexiones que puedes ver en la tarjeta para conectar la alimentación (los 3 conectores azules similares a las conexiones de los motores anteriores). En la siguiente imagen puedes ver, con flechas amarillas, los huecos utilizados en este montaje.
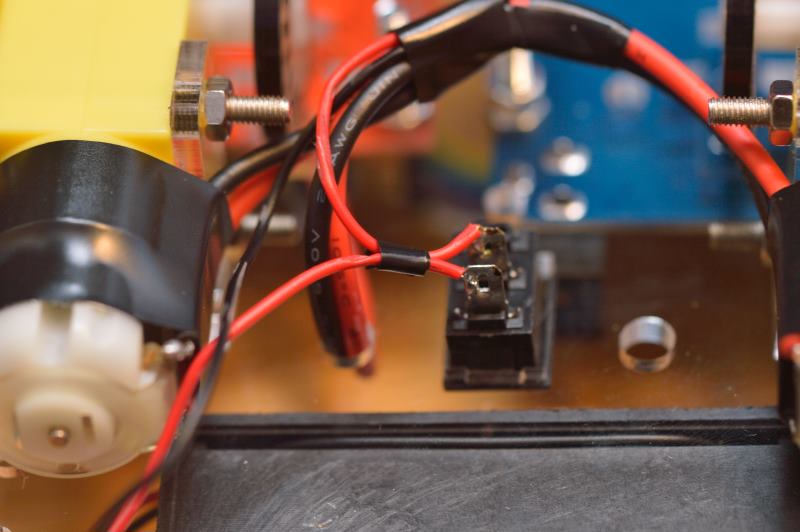
El interruptor que se colocó en la parte central durante el montaje de los diferentes elementos del robot, se puede utilizar para cortar la alimentación que suministran las pilas a los motores. Por tanto, deberías pasar el cable rojo de las pilas por el interruptor. Corta ese cable a la altura del interruptor (por la parte inferior del chasis) y suelda cada extremo a cada una de las patillas del interruptor. Conviene asegurar la conexión con un pequeño trozo de cinta aislante que una las dos partes del cable y así se eviten movimientos de los cables que puedan producir que se suelten los extremos soldados.
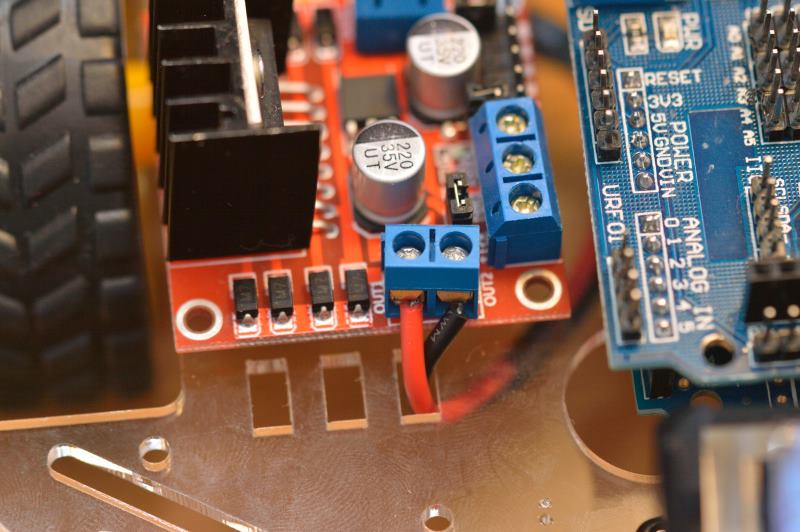
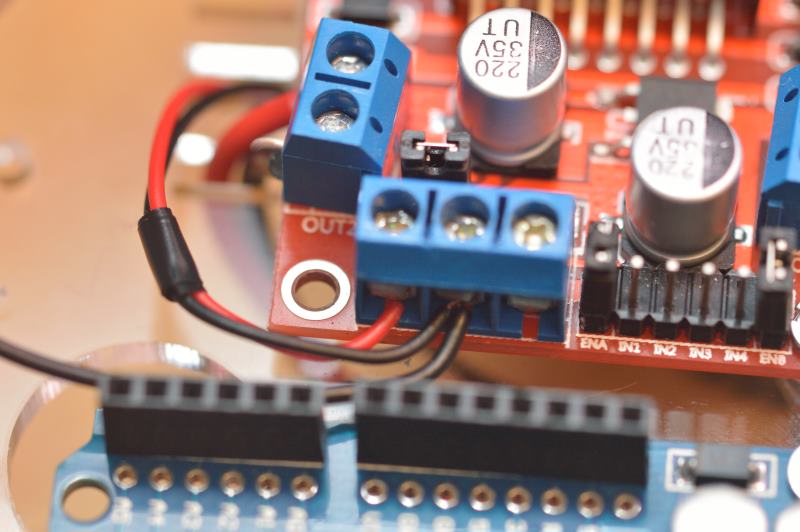
La conexión de ambos cables a la tarjeta controladora roja debe hacerse introduciendo el cable de alimentación (rojo) en el conector más a la izquierda de los 3 conectores azules de la tarjeta, etiquetado en la parte inferior de la tarjeta como +12V. En ese conector se puede conectar un cable de alimentación que trasporte entre 6 y 12 voltios, siempre que el jumper (pequeña ficha negra para interconexión de pines) que está justo detrás de esos conectores esté conectado. Las 4 pilas que puedes colocar en el porta-pilas enviarán 1,5 x 4 = 6 voltios a la tarjeta. En el Tutorial: Uso de Driver L298N para motores DC y paso a paso con Arduino puedes encontrar más información sobre las conexiones de este tipo de placas.
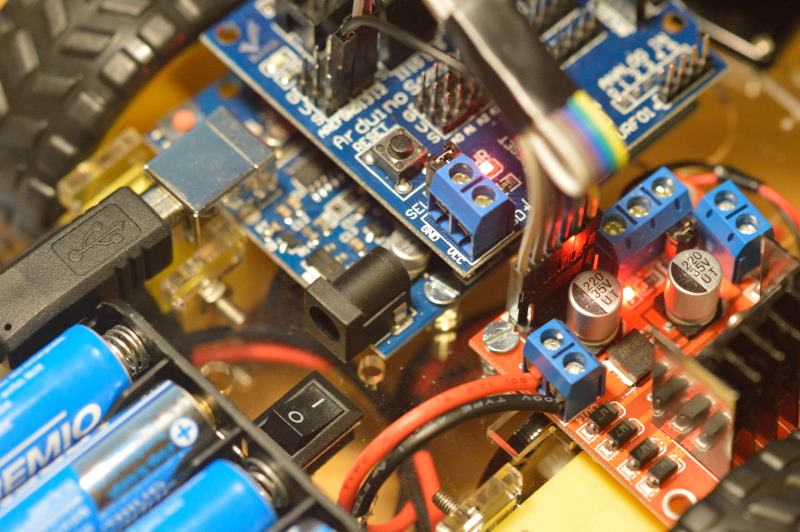
El cable negro, de toma de tierra, debe introducirse en el conector central de los 3 conectores de alimentación acabas de usar para el cable rojo. Pero además, hay que tener en cuenta que la toma de tierra de la tarjeta controladora de los motores debe conectarse también a una de las conexiones de toma de tierra (GND) de la tarjeta Arduino. Por tanto, utiliza un cable con un conector que puedas introducir en uno de los pies GND de Arduino y únelo al cable negro de las pilas. Una vez unidos introdúcelos juntos en el conector central de alimentación de la tarjeta roja. Ten en cuenta que en las siguientes fotos se ha desmontado la tarjeta Sensor Shield para poder hacer estas conexiones más cómodamente, y puedes ver que el cable que se ha unido al negro de las pilas tiene un conector hembra, ya que se conectará a cualquiera de los pines macho GND de la Sensor Shield. Si no se tuviera una tarjeta Sensor Shield, se debería usar un cable con conector macho, ya que se debería conectar a uno de los pines hembra GND de la Arduino.
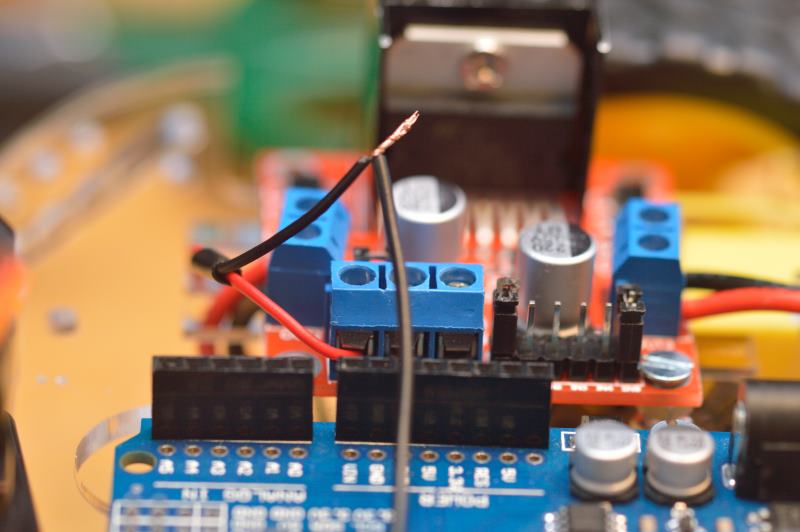
Aquí puedes ver cómo pueden quedar las conexiones con más detalle. El conector que se ve en la imagen a la derecha, etiquetado en la parte inferior de la tarjeta como +5V, no se va a utilizar. Ese conector ofrece un voltaje de salida de 5V que podría utilizarse para alimentar otra tarjeta, por ejemplo, la tarjeta Arduino, pero el consumo de los motores es elevado para que también sus mismas pilas alimenten la tarjeta Arduino y los sensores que vamos a utilizar, por lo que tendremos que alimentar la tarjeta Arduino con alguna fuente de alimentación más posteriormente.
Conexión de los cables de control de los motores
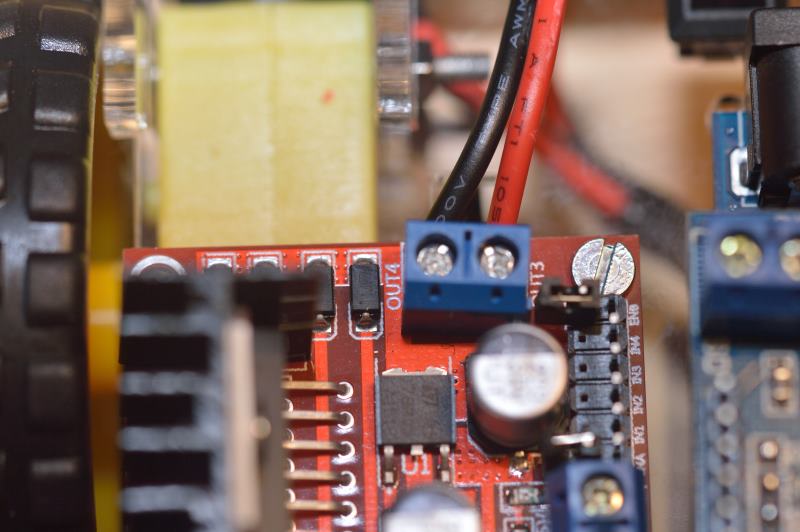
Ahora puede ser el momento de hacer las conexiones del cableado que controla el encendido de los motores, su sentido de giro e incluso su velocidad. Esto se hará con las conexiones etiquetadas como INA, IN1, IN2, IN3, IN4 e INB. Inicialmente verás que los conectores INA e INB pueden estar ocupados por un jumper. Si es así quita esos jumpers para poder introducir los cables que controlarán la velocidad de cada uno de los motores (si se dejan conectados esos jumpers, los motores siempre funcionarán a velocidad máxima). Los pines IN1 a IN4 permiten controlar el sentido de giro de los motores, correspondiendo 2 de ellos al motor derecho y los otros 2 al motor izquierdo. En función de cuál de esos pines se active, un motor girará en un sentido o el contrario.
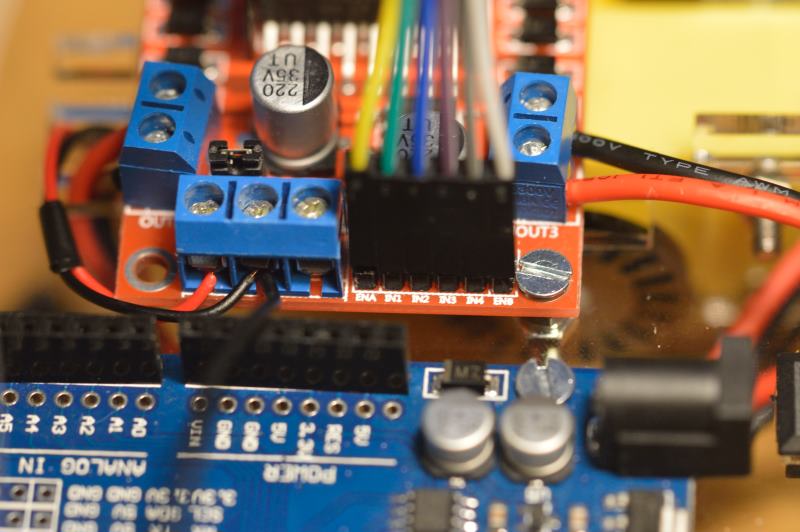
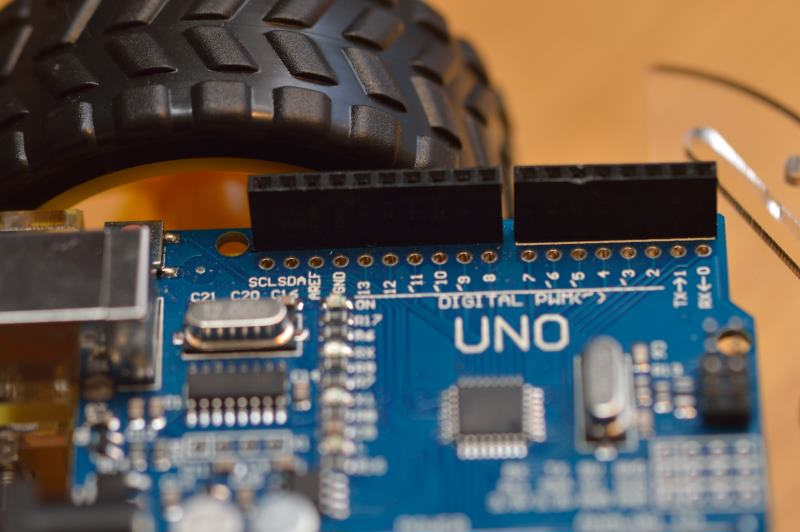
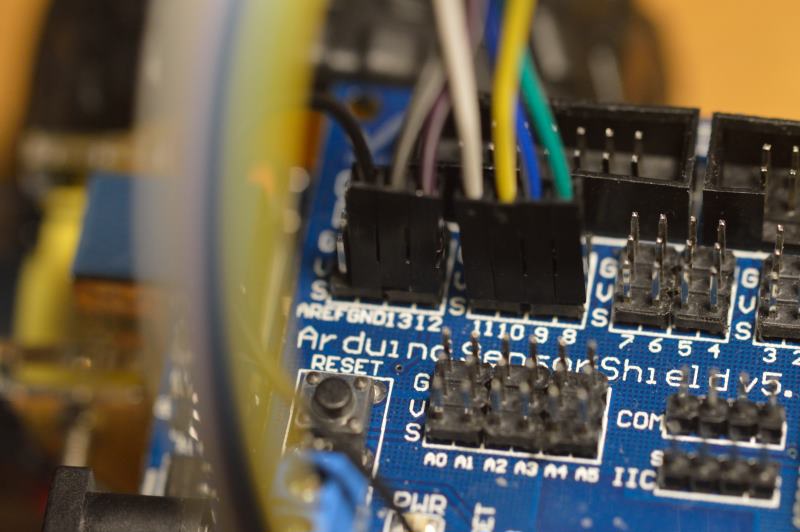
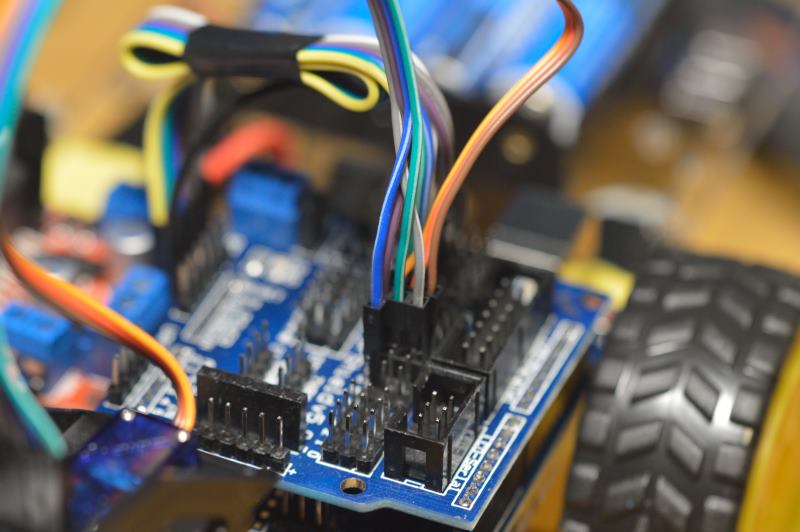
Los conectores INA e INB se utilizarán para controlar la velocidad de cada uno de los motores, lo cual es realizado por esta tarjeta controladora usando PWD (Pulse-Width Modulation) lo que requiere que se conecte a uno de los pines de la tarjeta Arduino que aparecen etiquetados con ~ como son los pines digitales 11, 10, 9, 6, 5, y 3 como puedes ver en la siguiente imagen. Ten en cuenta que si usas una Sensor Shield, dejarás de ver esas marcas, por lo que deberás comprobar qué pines tienen esa marca para luego hacer las conexiones en los pines de la Sensor Shield. En este montaje, el cable amarillo va a INA y se ha conectado al pin 10 de la Sensor Shield (en la fila de los pines etiquetados como S, de señal). El pin INB se ha conectado con un cable gris claro que va al pin 11 que también es PWM. Las conexiones restantes han sido: IN1 - pin 8; IN2 - pin 9; IN3 - pin 12; IN4 - pin 13.
Debido a una incompatibilidad de la librería Servo (utilizada para el control de servomotores, como se usará en este robot para la detección de obstáculos), no se deben usar los pines 9 y 10 para ser usados con PWM. Por lo que en el montaje final se ha optado por usar el pin 5 (que también admite PWM) para contectarlo al pin ENA (cable amarillo, aunque en la foto no se refleja el cambio).
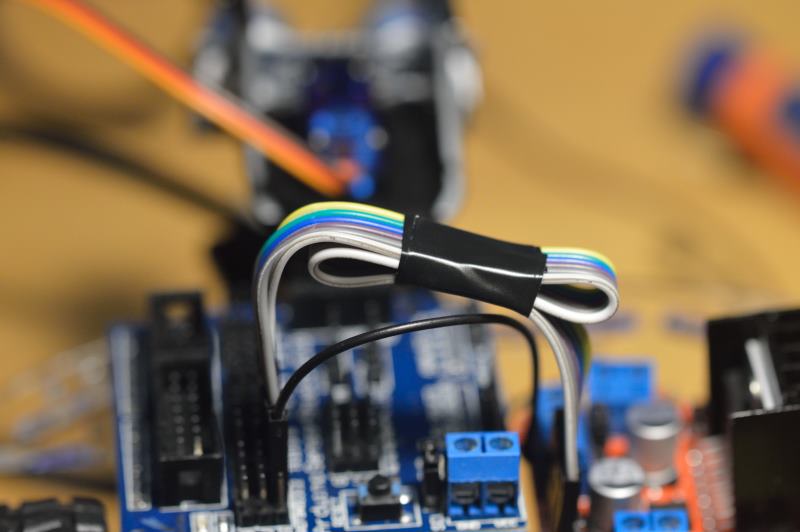
Procura dejar los cables lo mejor recogidos que se pueda, utilizando por ejemplo un trozo de cinta aislante, para evitar que se suelten los conectores en la medida de lo posible, sin tener que llegar a hacer más soldaduras definitivas.
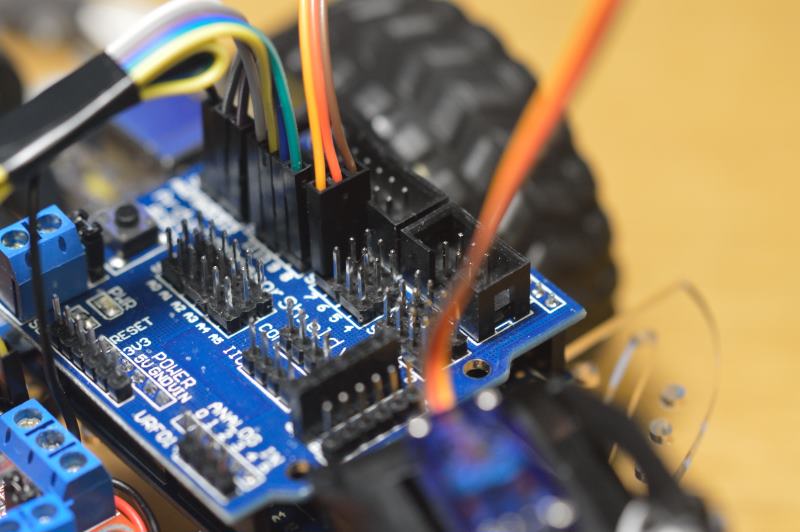
Observa en la siguiente imagen que el cable de toma de tierra que iba a la tarjeta controladora de los motores, se ha conectado a uno de los pines etiquetados como GND, junto al pin 13.
Conexiones para el sensor de proximidad
El sensor de proximidad HC-SR04 permitirá programar el robot para que evite colisionar con obstáculos que se encuentren frente a él. El kit viene equipado también con un servo-motor que permite girar el sensor de proximidad hacia los lados, para detectar obstáculos en un rango mayor.
Conexión del cableado del servo-motor
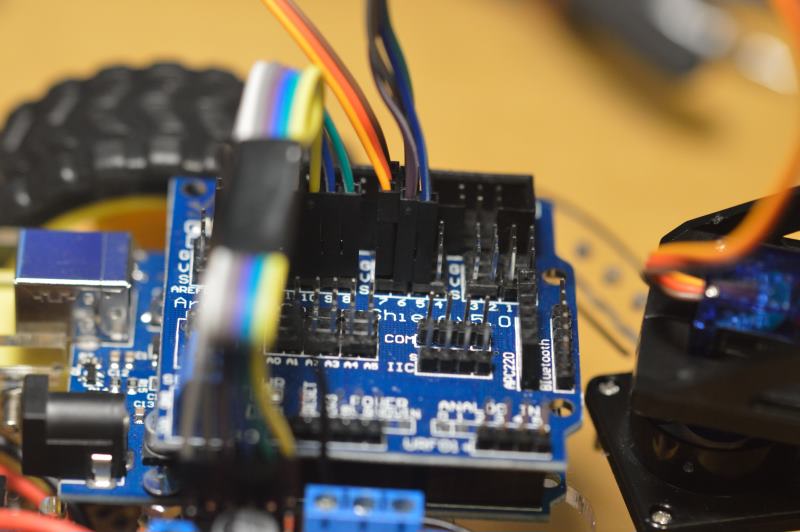
El servo-motor SG90, que ya ha sido montado en su soporte, dispone de 3 cables con las siguientes funciones: Marrón = toma de tierra; Naranja = +5V; Amarillo = Señal. Si utilizas la tarjeta Sensor Shield la conexión de esos cables es muy sencilla. En este montaje se ha utilizado la fila de pines digitales 7 que consta de 3 pines: S (señal), V (voltaje) y G (toma de tierra) como el resto de pines de la Sensor Shield, conectando el cable amarillo naranja (señal) a la etiquetada como S, el naranja rojo (+5V) a la central V, y el cable marrón (toma de tierra) a G.
Conexión del cableado del sensor de proximidad (HC-SR04)
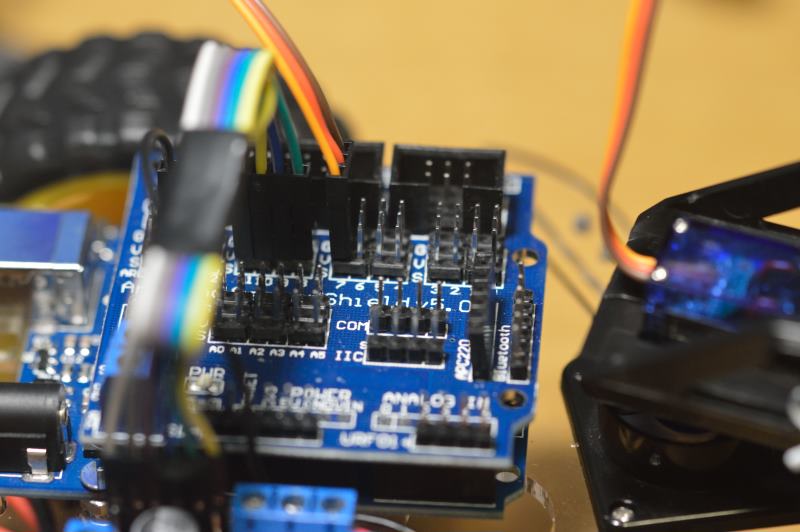
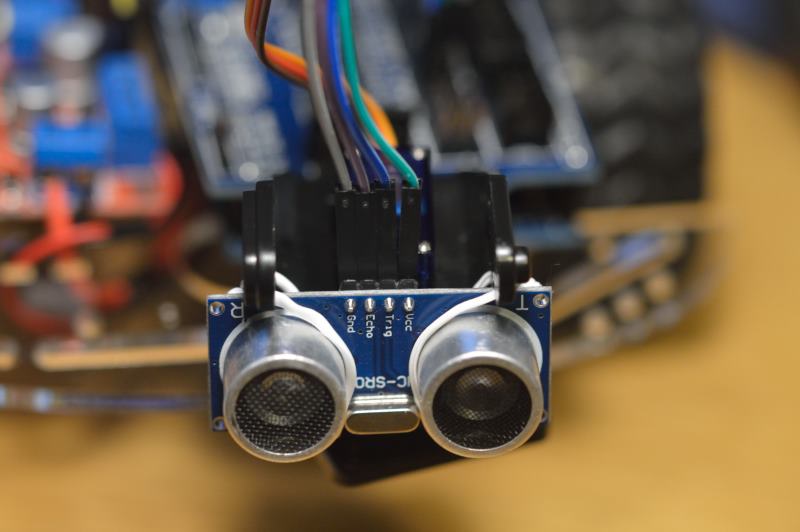
En el caso del sensor de proximidad HC-SR04, se dispone de 4 conectores etiquetados como: Gnd = toma de tierra; Echo = Receptor de pulso ultrasónico; Trig = Emisor de pulso ultrasónico; Vcc = voltaje +5V. En este montaje se ha utilizado la fila de pines 6 para 3 de esas conexiones: Gnd a G (gris); Vcc a V (verde) y Echo a S (violeta). Por último, el conector Trig, que ya no cabe en la fila 6 se ha conectado con cable azul en el pin digital 5 (en el pin de señal S).
En las siguientes imágenes puedes ver cómo ha quedado en este caso, por si te sirve de referencia:
Prueba de alimentación eléctrica
Ahora, si conectas el cable USB de la tarjeta Arduino al PC, colocas las 4 pilas respetando su polaridad en el porta-pilas y enciendes el interruptor, deben encenderse los leds de alimentación de las tarjetas.
Montaje finalizado
En las siguientes imágenes puedes ver cómo ha quedado el robot en el montaje que se ha hecho para este tutorial:
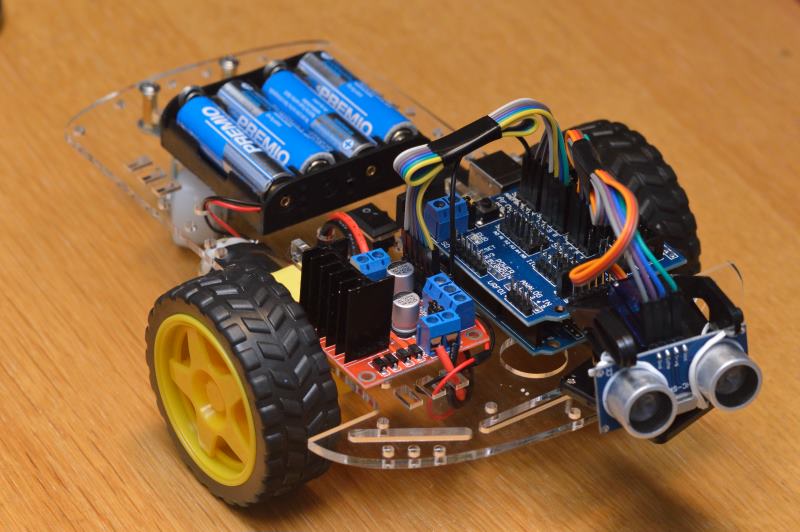
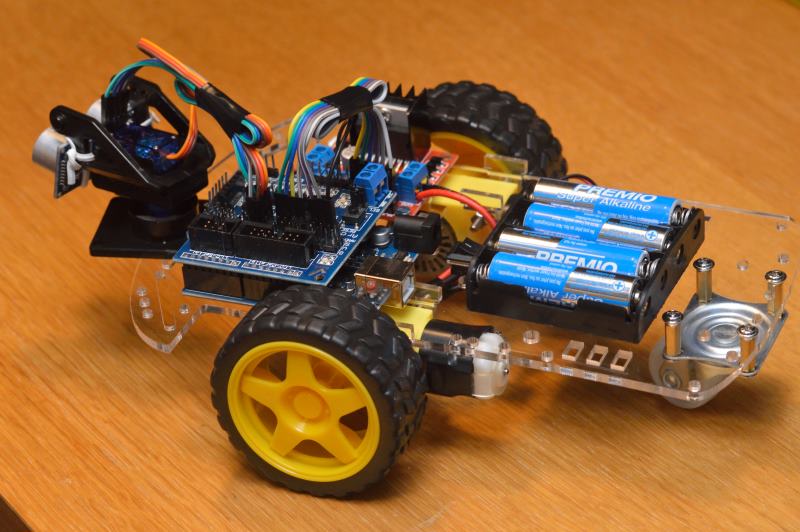
Observa también la parte inferior del chasis para que puedas ver cómo pueden quedar los cables y los motores: