Montaje de los motores
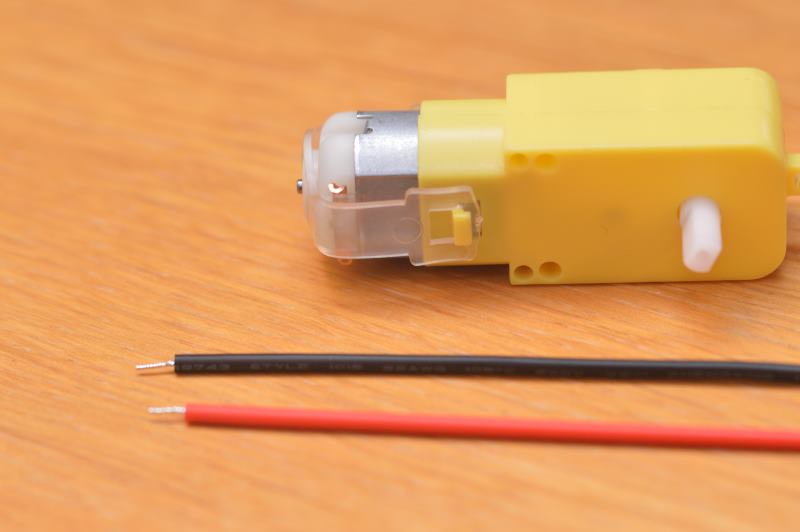
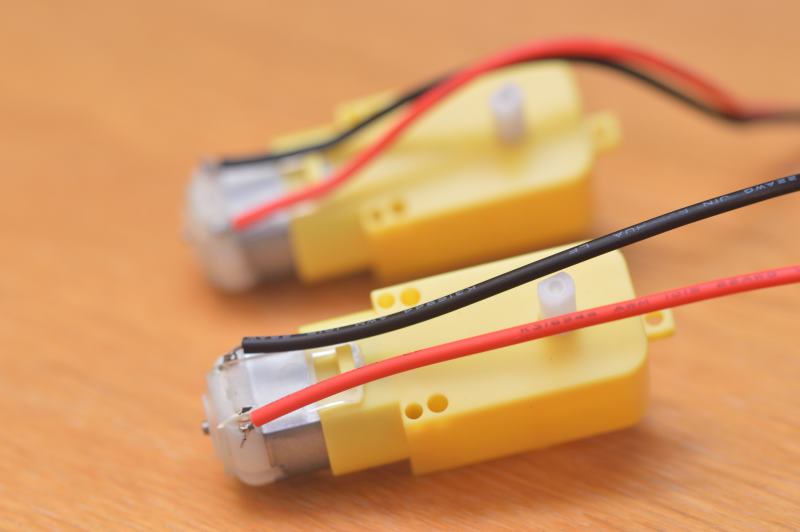
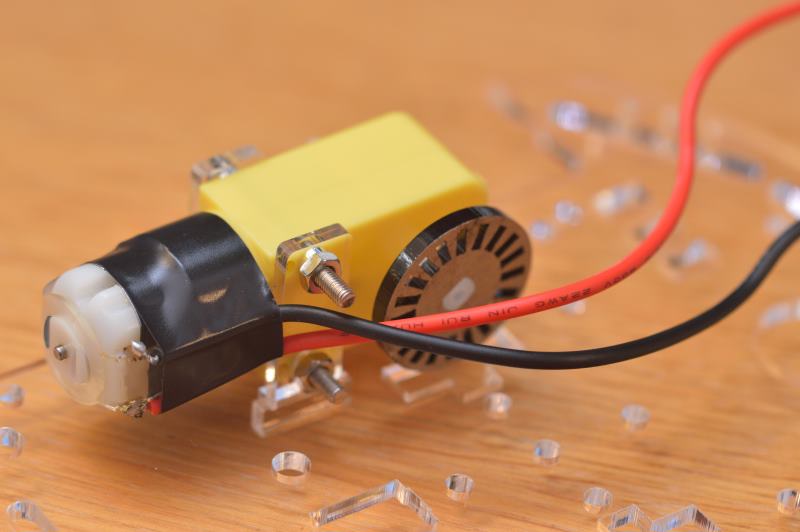
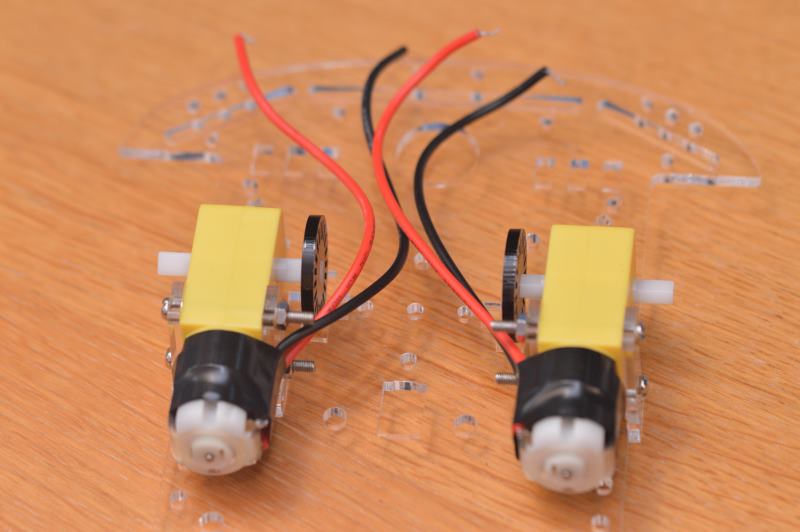
Suelda los cables rojo y negro que vienen en el kit del chasis a los motores. En principio no importa en qué patilla del motor sueldas el cable rojo o el negro, ya que después se podría cambiar el sentido del giro desde la aplicación que se programe o en las conexiones que se harán a las tarjetas controladoras, pero lo mejor es mantener el mismo orden para ambos motores.
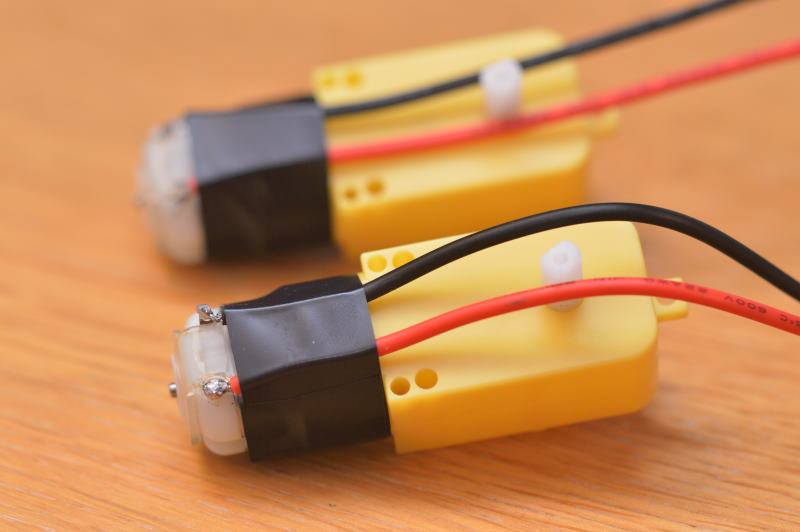
Con el fin de evitar roturas en los cables o en las patillas de los motores, ya que todos esos elementos son bastantes delicados y podrían romperse al moverse repetidamente, puede ser recomendable fijarlos con un poco de cinta aislante al motor.
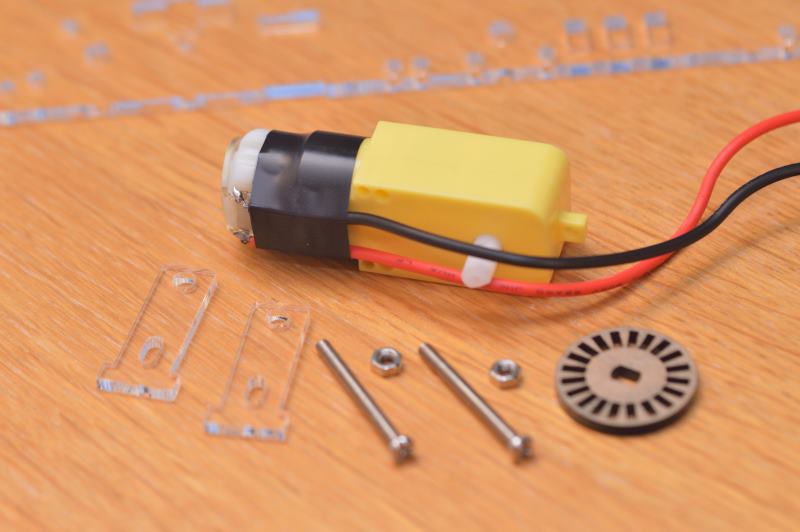
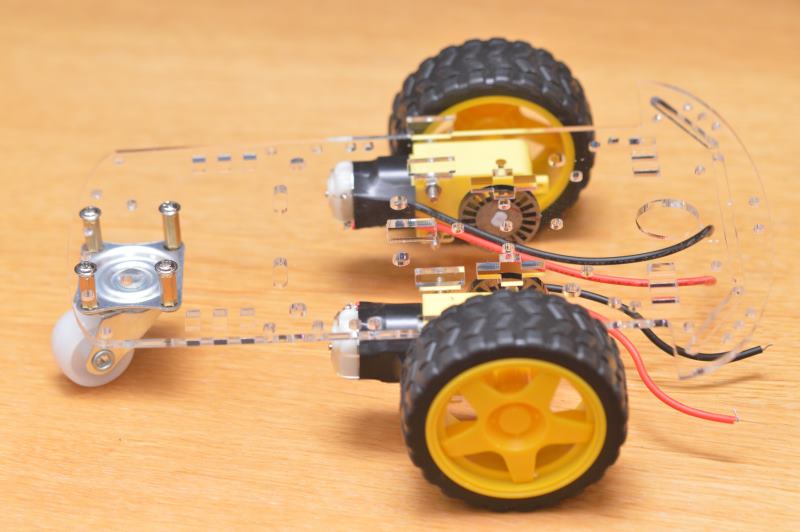
Introduce uno de los soportes de los motores (en forma de T) por el hueco que hay para él en el chasis del coche, y en el otro soporte introduce los tornillos largos que vienen en el kit junto con los motores. El lado amarillo del motor debe quedar orientado hacia el frente del coche, de manera que el eje del motor quede a la misma altura que la cruz que puedes ver en el chasis del coche.
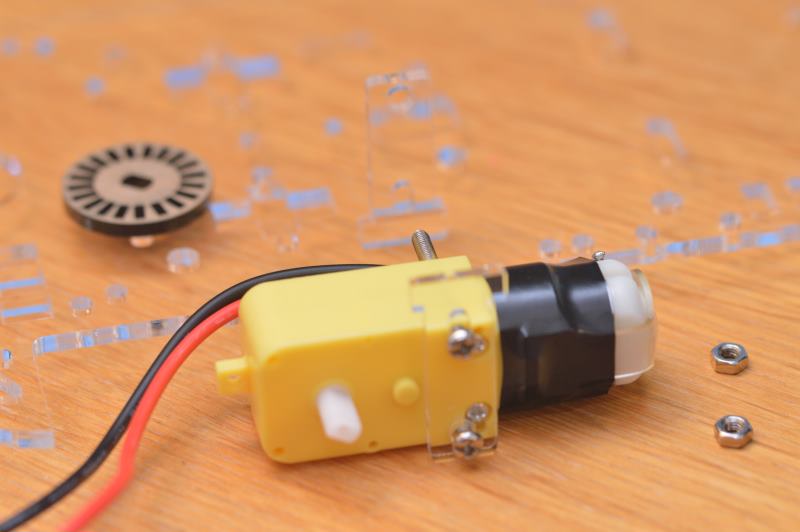
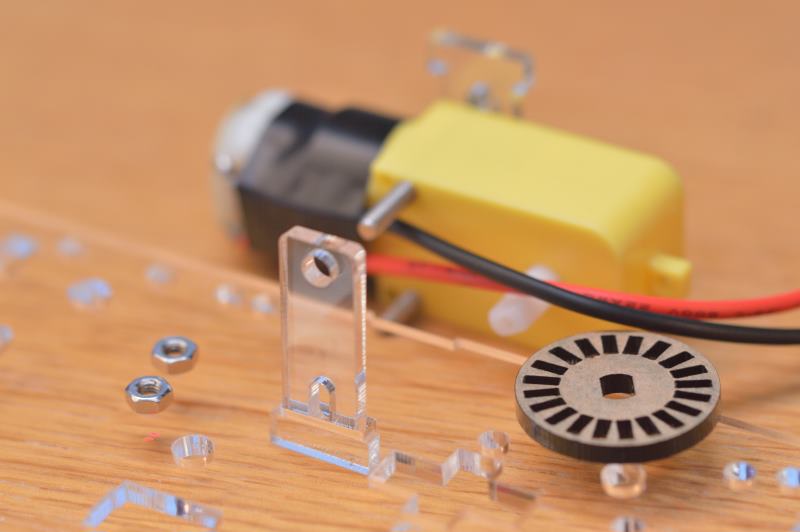
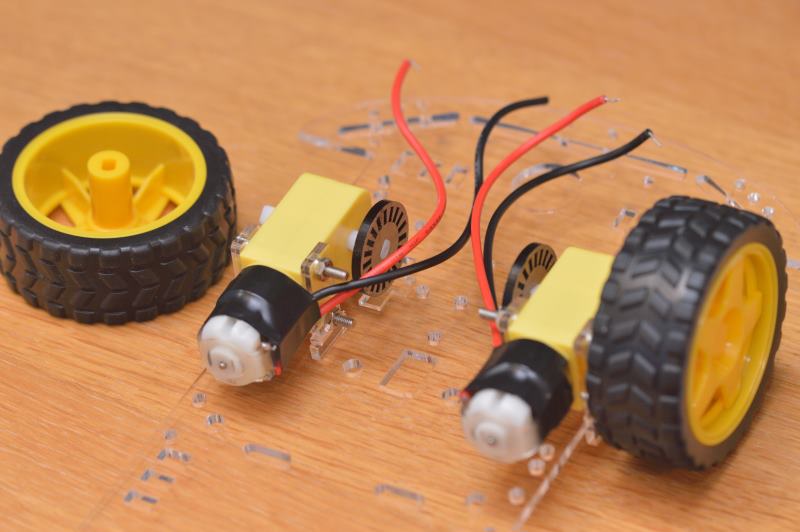
Termina de unir los dos soportes usando los tornillos y sus tuercas de manera que quede bien fijado el motor al chasis. Asegúrate de que el soporte externo se apoya correctamente en la muesca del chasis. Encaja también en la parte interior del eje la rueda pequeña agujereada que se podría utilizar de velocímetro, aunque en este caso no se va a utilizar.
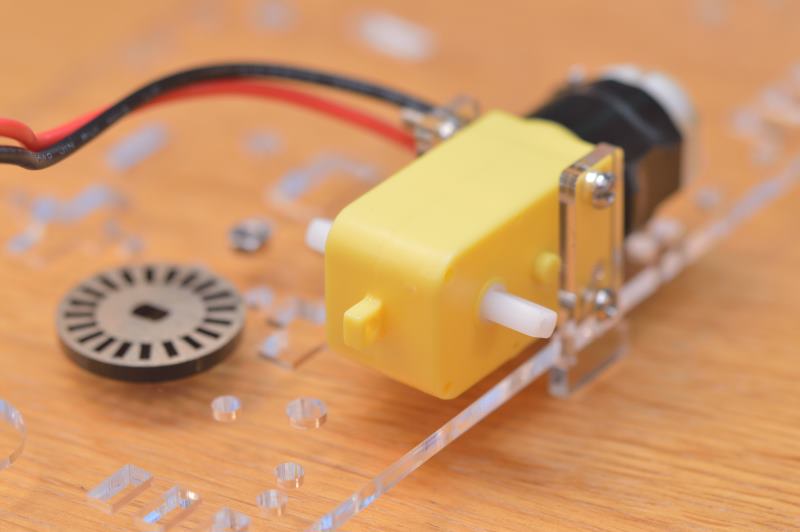
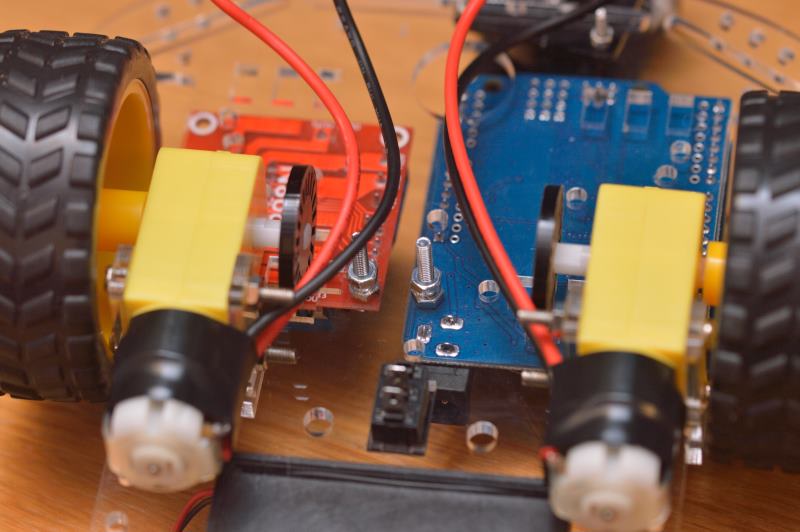
Termina de colocar los dos motores de la misma manera a ambos lados del chasis y encaja las ruedas en los ejes por la parte exterior.
Montaje de la rueda loca
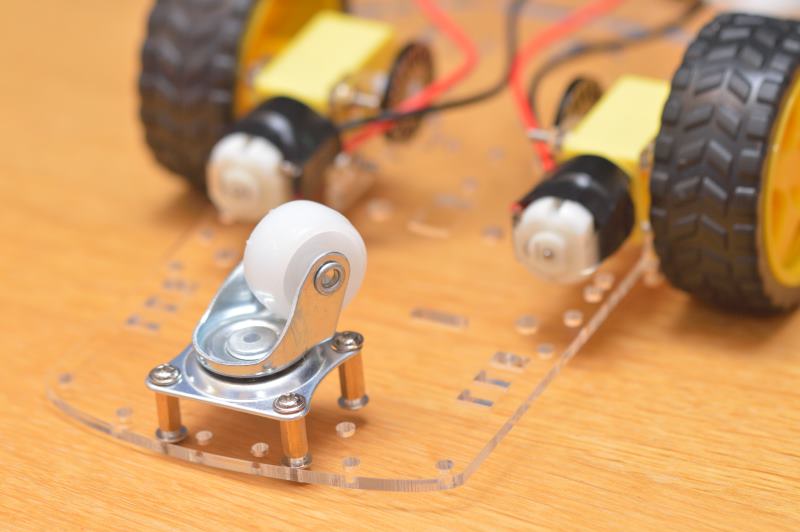
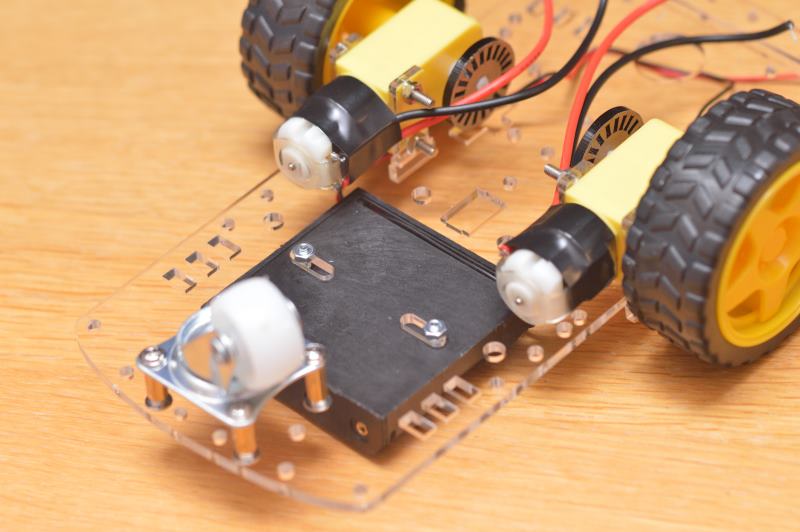
Ahora podrías colocar la rueda loca que sirve de apoyo en la parte trasera. Utiliza los 8 tornillos de la imagen y las 4 tuercas de extensión que se deben colocar por lo que será la parte inferior del chasis (donde quedan los motores).

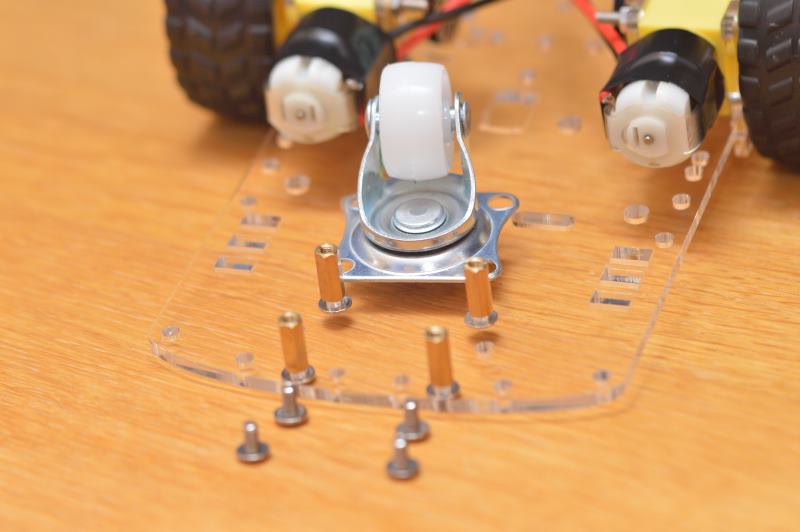
De momento deberá ir quedando algo como lo que se muestra en las imágenes.
Montaje del soporte para pilas
Coloca a continuación el soporte para las pilas. A partir de ahora no hay un sitio exacto donde colocar los siguientes elementos en el chasis, por lo que aquí se proponen unas fijaciones, pero quizá tú mismo puedas encontrar otras ubicaciones mejores, o quizá en el chasis que hayas adquirido cambien los agujeros y debas buscar otras ubicaciones. En este caso se va a colocar el soporte de las baterías en la parte trasera, aprovechando los dos agujeros longitudinales.
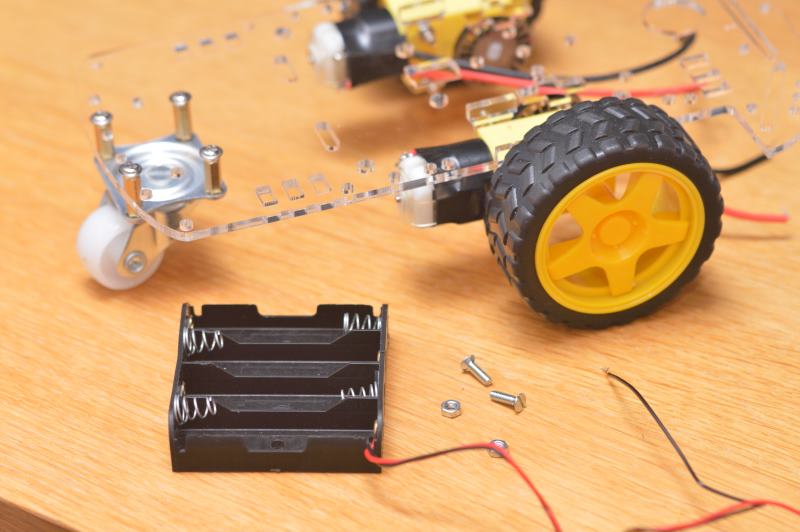
Para fijar la caja puedes usar un par de tornillos M3x10 o más largos, con cabeza avellanada para que no choquen con las pilas, pero ten en cuenta que no vienen en el kit. En Leroy Merlin se pueden encontrar, por ejemplo.
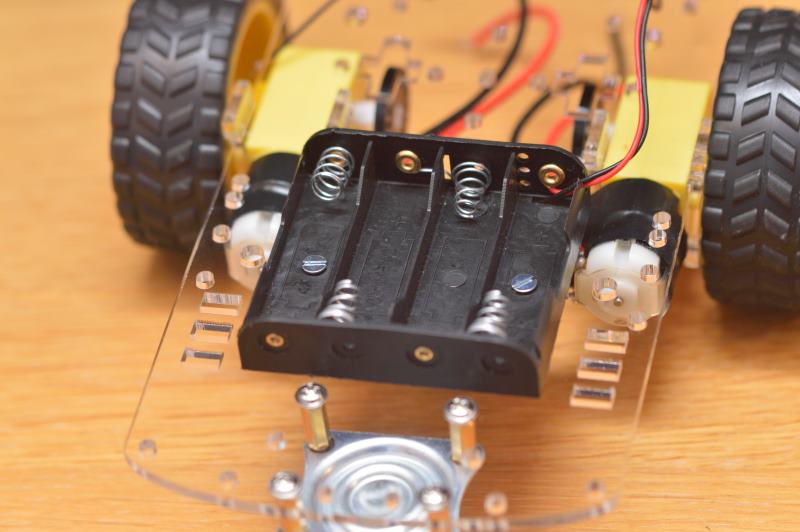
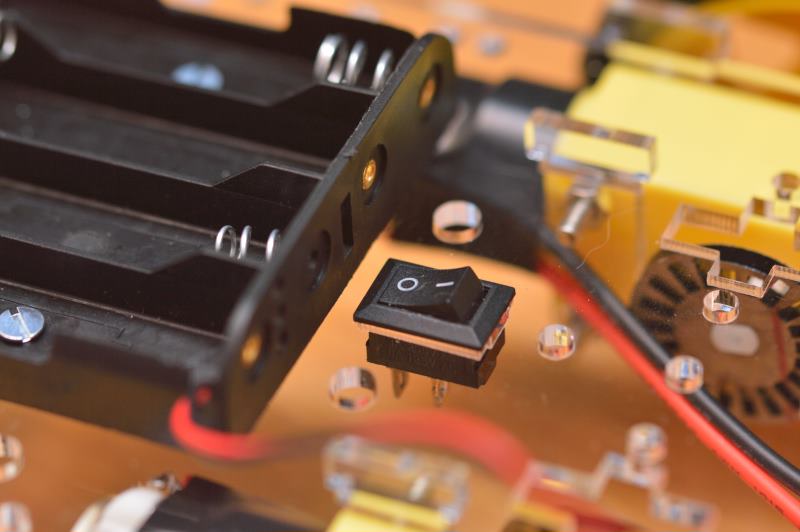
Puedes dejar colocado ya si quieres el interruptor en el hueco de la parte central del chasis. Posteriormente se harán todas las conexiones del cableado.
Montaje del sensor de proximidad y su servo-motor
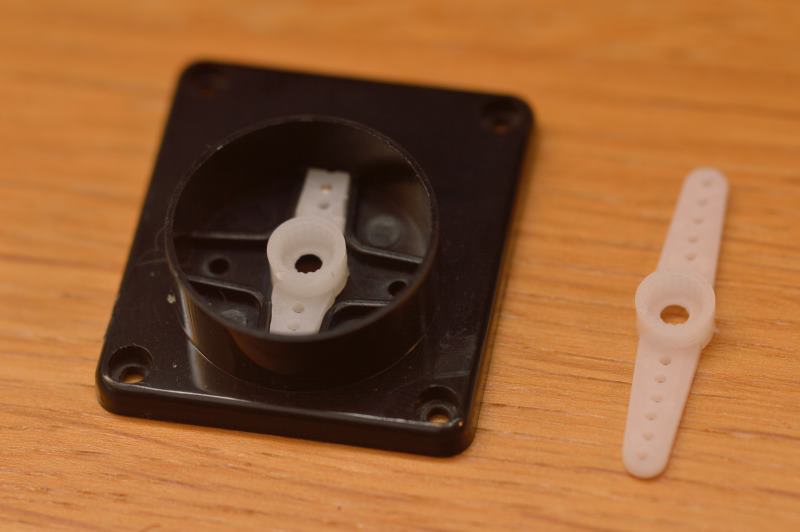
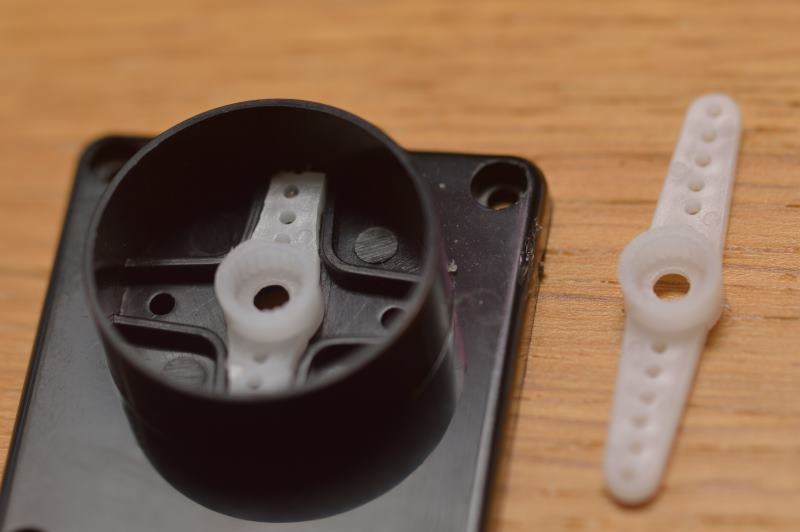
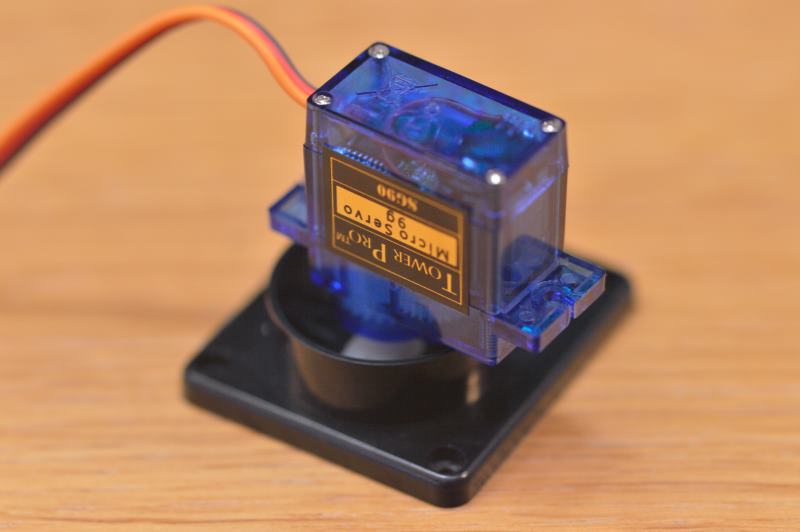
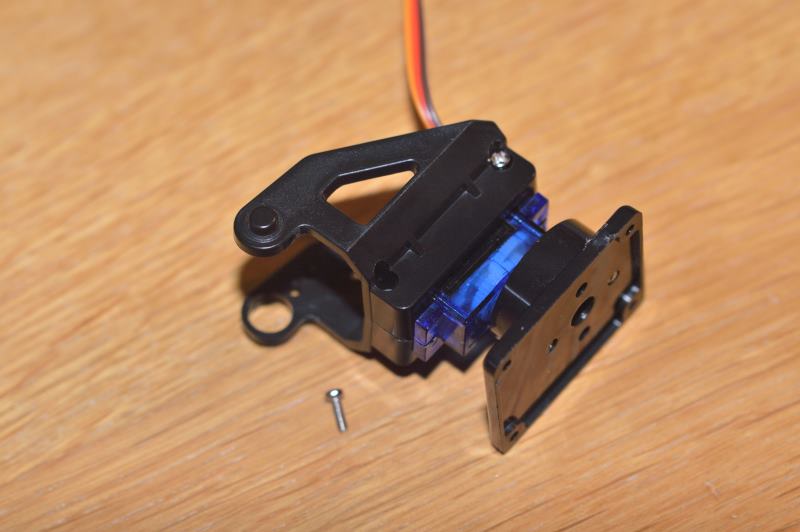
Debes colocar uno de los accesorios blancos que se acoplan al servo-motor dentro del soporte inferior. Junto con el servo-motor vienen 3 accesorios blancos con distintas formas que se pueden colocar en el eje del servo-motor. Para este caso, puede venir bien el alargado, aunque deberás cortarle un trozo por cada extremo con un cúter para que encaje dentro del soporte negro de la parte inferior como se ve en la imagen.
Utiliza un par de tornillos de los más pequeños que vienen con el soporte del servo-motor para fijarlo desde la parte trasera.

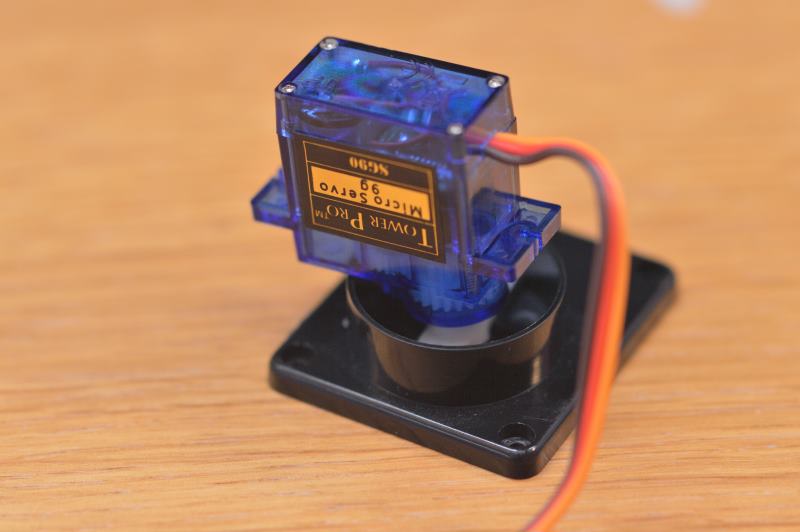
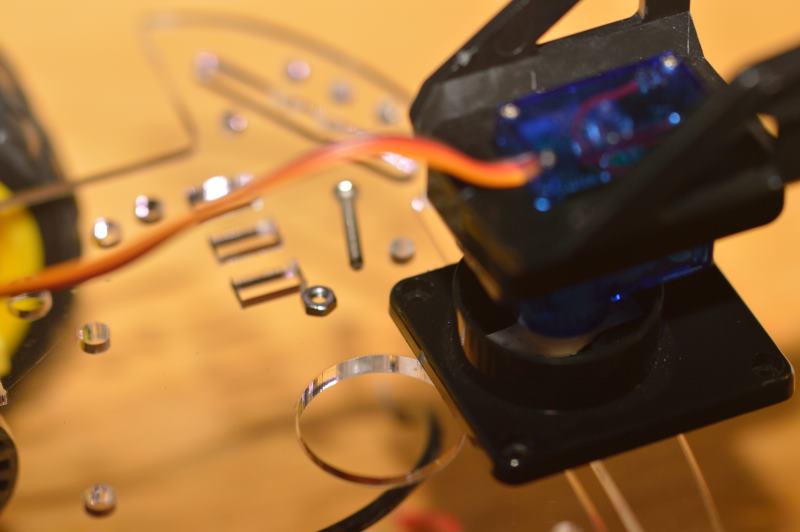
Introduce el eje del servo-motor dentro de la parte central del accesorio blanco que acabas de colocar.
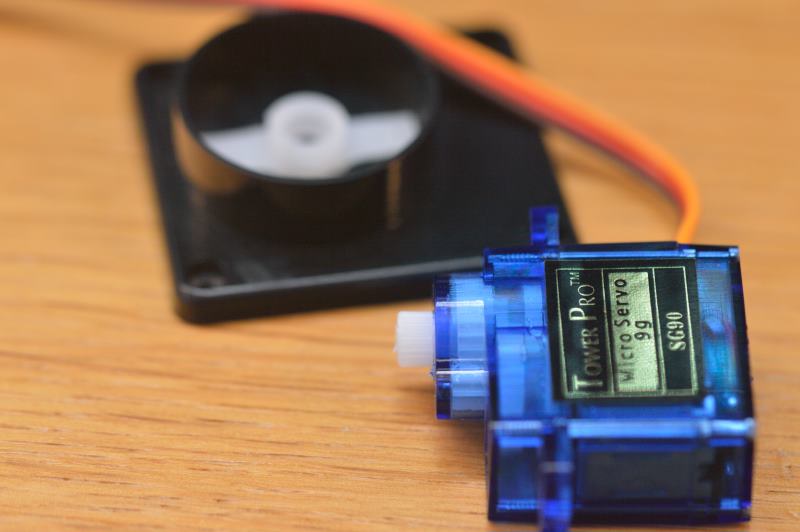
Debes asegurarte de que el servo-motor se ha colocado de manera que puede hacer el giro de 180 grados correctamente, es decir, de un lado al otro del soporte.
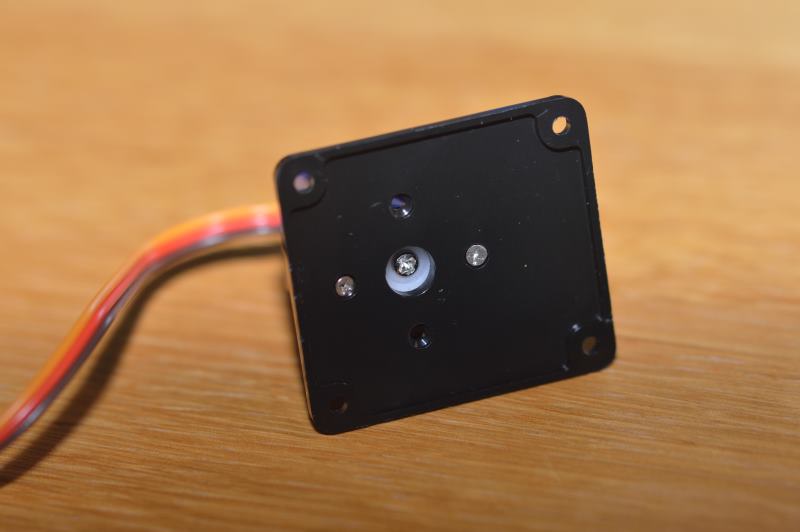
Introduce el tornillo más grande que viene con los accesorio del servo-motor por la parte inferior del soporte para fijar el eje del servo-motor al soporte.

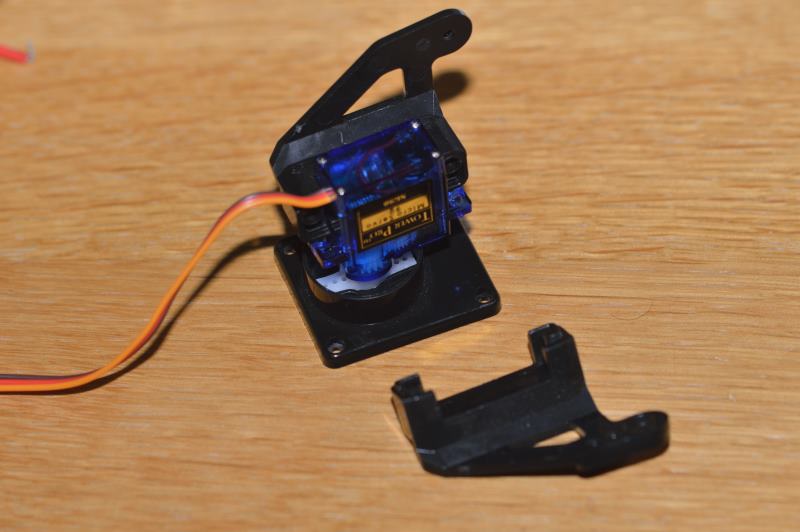
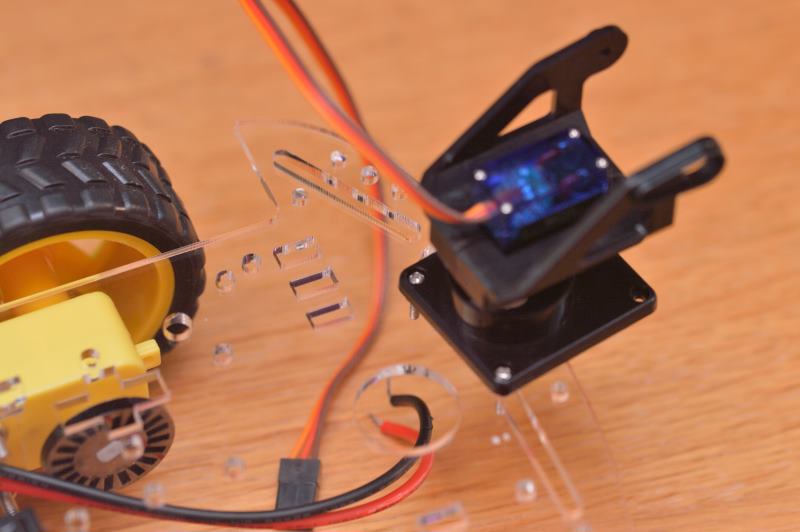
Coloca ahora los laterales del soporte, introduciendo las solapas del servo-motor por las hendiduras de las piezas del soporte. Utiliza un par de tornillos de los que vienen con el soporte para dejar fijadas ambas partes.
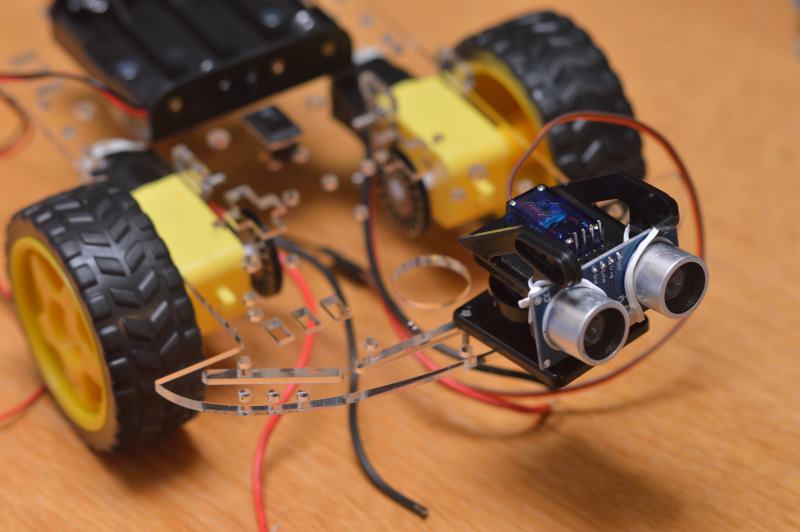
Busca ahora en el chasis alguna disposición adecuada para colocar el soporte del servo-motor y fíjalo usando un par de tornillos y tuercas que acompañan al soporte del servo-motor. En este montaje se ha tenido que montar quedando algo girado el soporte, ya que no se han encontrado 2 agujeros que coincidieran más adecuadamente, y se ha usado un agujero y el hueco longitudinal que se ha encontrado en la parte frontal del chasis.
Para montar el sensor de proximidad por ultrasonidos (HC_SR04) tampoco hay una manera precisa de montarlo, así que hay que echar mano de nuevo a la inventiva y usar, por ejemplo, un par de sujeta-cables o algo parecido.
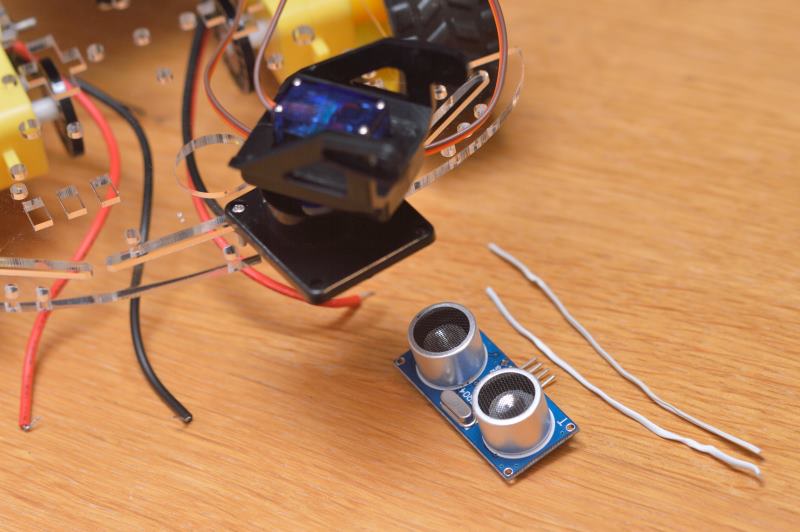
Busca la manera de sujetar lo mejor posible el sensor al soporte aprovechando los huecos que encuentres.
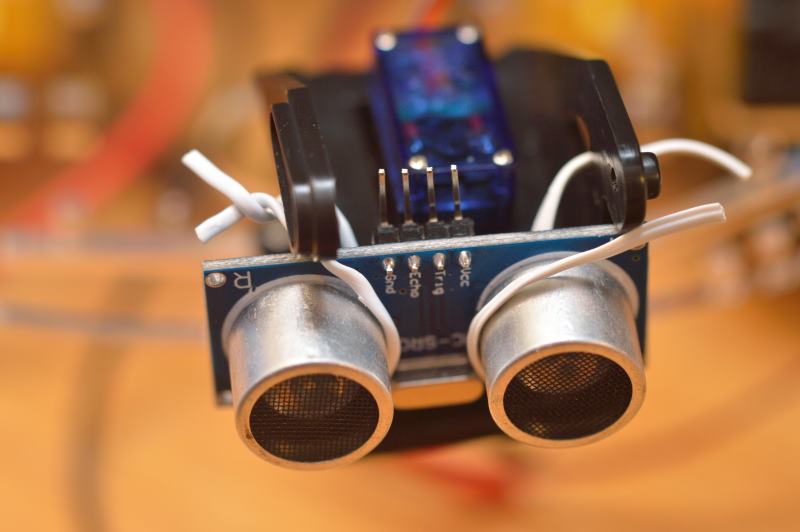

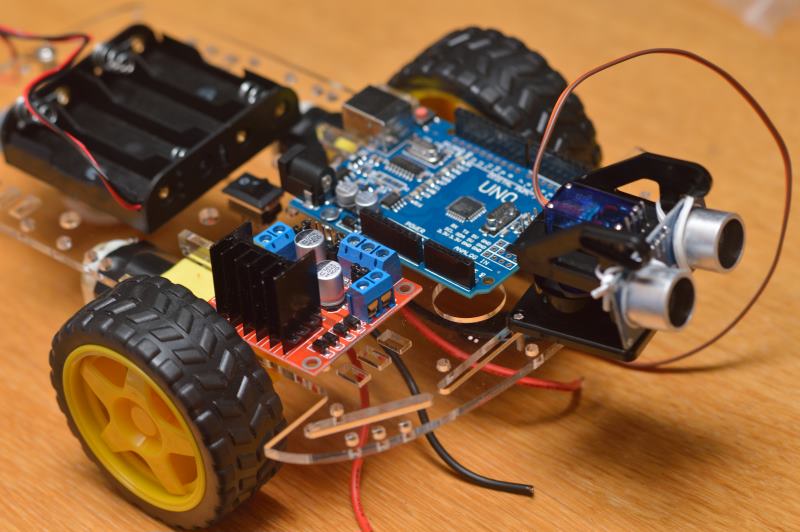
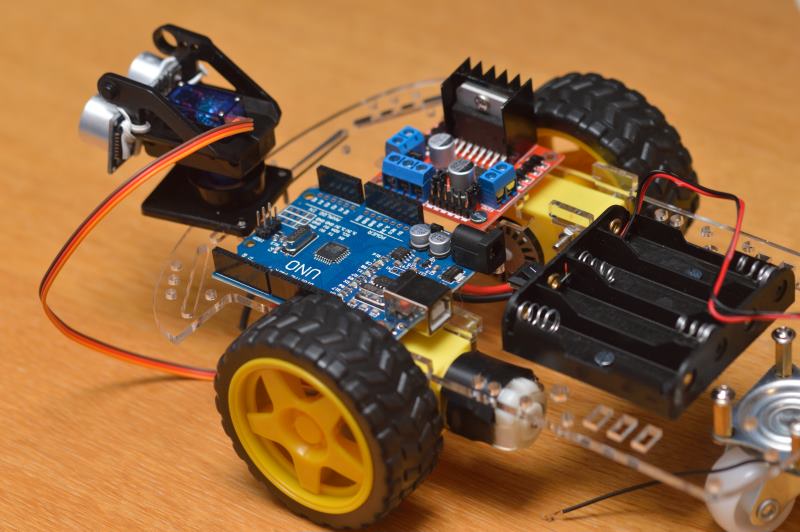
Deberá quedar algo así:
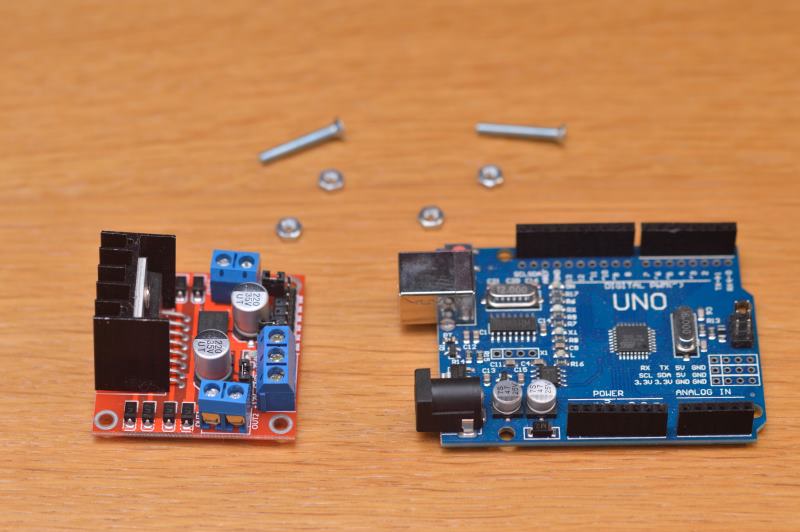
Montaje de las tarjetas controladoras
Deberás fijar la tarjeta Arduino y la placa controladora de los motores L298N (la roja más pequeña) buscando la mejor colocación posible en el espacio que vaya quedando y algún agujero que coincida con los de las placas para utilizar algún tornillo que las sujete. Deberás usar tornillos M3x15 o M3x20 que no vienen con el kit.
Para que las placas tengan un mejor apoyo, deberás usar alguna arandela, tuerca o alargador por la parte inferior de la placa para que haga de pata y mantenga algo de separación entre el chasis y las placas.
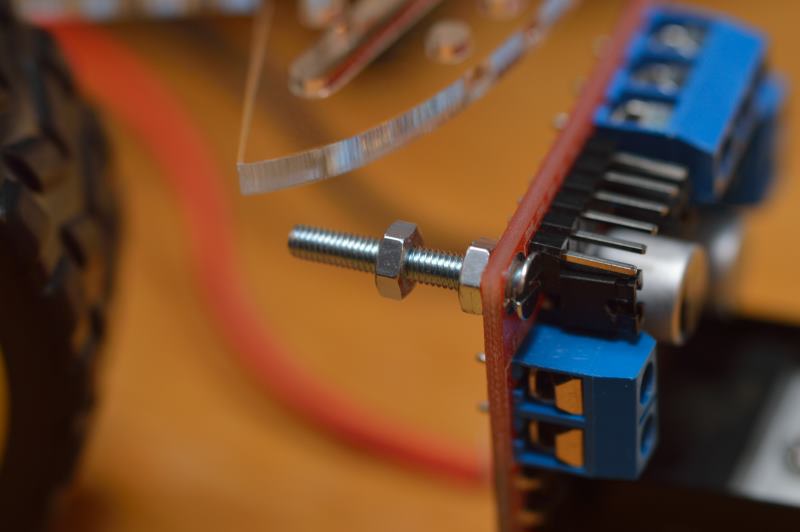
En el caso del chasis que se ha usado, sólo se ha podido encontrar un hueco para cada placa. Aunque sería recomendable encontrar o hacer al menos 2 agujeros para cada placa, puede ser suficiente así.
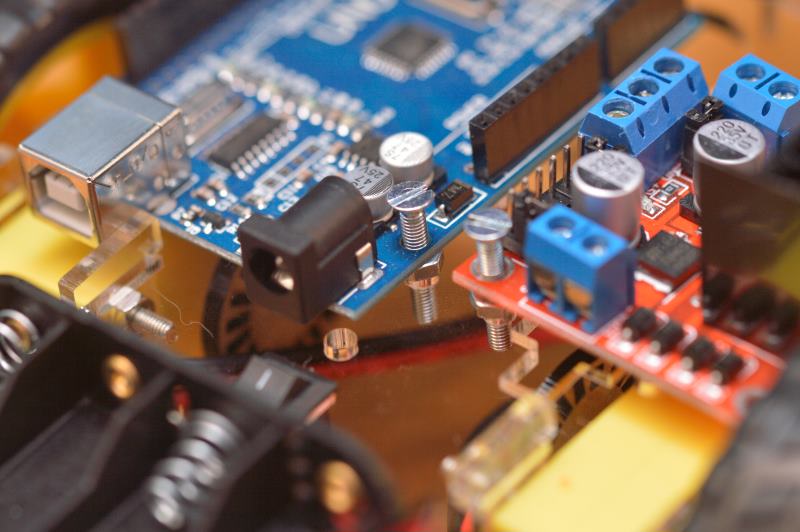
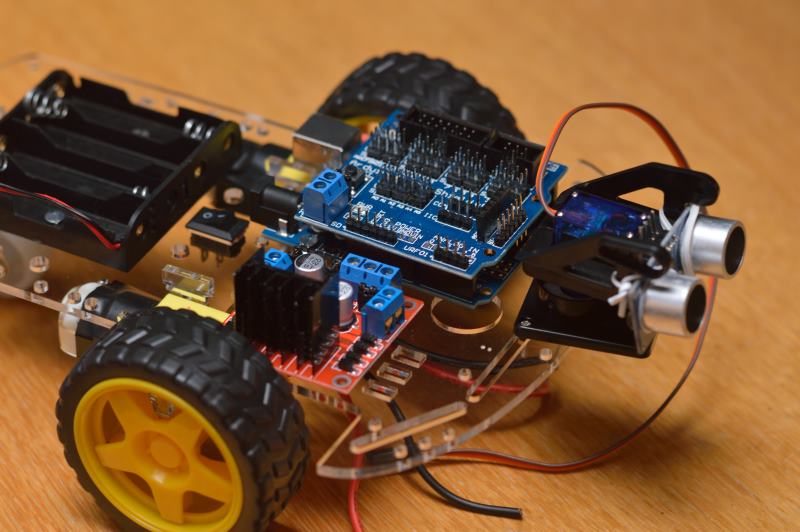
Así podrían quedar:
Montaje de la tarjeta Sensor Shield
La tarjeta Sensor Shield que puede venir con el kit puede facilitar las conexiones del cableado con los sensores, aunque no es totalmente necesario su uso, ya que se pueden hacer las conexiones directamente a la tarjeta Arduino, pero habría que hacer algunas soldaduras, sobre todo con los cables de alimentación y tomas de tierra. Para montarla, simplemente se debe encajar sobre la placa Arduino, comprobando que quedan bien colocados los pines.
Ahora puedes continuar la construcción del robot con las Conexiones del cableado de Smart Car Arduino.